Temp = 0
def on_forever():
global Temp
Temp = input.temperature()
basic.show_number(Temp)
basic.pause(5000)
basic.forever(on_forever)
分类: 技能
让鸿蒙智能家居开发板与AWS IoT云完美连通
本期直播简介:
使用鸿蒙智能家居开发板连通AWS IoT云平台
直播课程大纲:
1、AWS IoT平台介绍
2、AWS IoT SDK介绍
3、移植AWS IoT SDK到HarmonyOS
4、实现HarmonyOS接入AWS IoT
三大隐藏福利:
1、讲师在线答疑互动
2、一个小时两轮抽奖
3、进群掌握一手资讯
讲师介绍:
连志安——广州旗点智能科技有限公司创始人
从事物联网行业开发,擅长物联网、嵌入式、Linux、HarmonyOS、RTOS等技术。
书籍《物联网——嵌入式开发实战》
直播抽奖:
免费报名+到会看直播,赢取HarmonyOS官方联名T恤、HarmonyOS官方开发板(HiSpark Wi-Fi IoT 智能家居套件)
(中奖用户所填写收件人姓名、电话、地址需为真实信息,信息仅用于工作人员联系用户发放奖品。)
适合人群:
想要学习以下知识的人群:
1、HarmonyOS网络通信
2、利用HarmonyOS连接云平台
3、AWS IoT平台接入
扫码进群:
扫描下方二维码,加入AWS技术交流群
(如无法进群,请添加小助手微信:xiao51cto,备注“AWS加群”)

触碰即盛放的“宝莲灯”——Arduino创意作品
编者注:这是一个名叫JiříPraus的外国小哥实现的Arduino创意作品,实际上是“郁金香”,但看着太像中国神话故事里的“宝莲灯”了。
轻轻抚摸就会绽放,它的六个花瓣将缓慢打开并照耀出彩虹般的光。当花瓣闭合时,它们会产生令人难以置信的带有叶子图案的光。

所需材料:
Arduino Nano R3
SG90微型伺服电机
TTP223触摸传感器
1mm黄铜丝
2mm黄铜管
0.3mm绝缘铜线
WS2812 5050 NeoPixel LED灯 x 7
白色SMD 1206 LED x 30
附注:如何焊接黄铜
https://davidneat.wordpress.com/2015/05/03/a-quick-guide-to-soldering-brass/amp/
推杆如何与花瓣一起运动
当推杆向上移动时,它将连杆和花瓣向下拉。当它向下移动时,它拖着连杆,将花瓣闭合。
单片花瓣的构成:
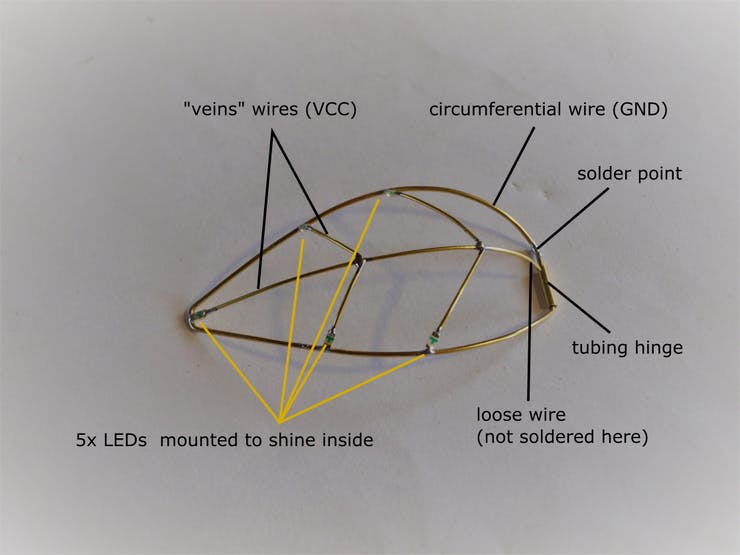
花瓣由黄铜细条组成,花瓣内有5个白色LED和同一根导线构成的“静脉”结构。
相同的花瓣,一共要做6个。否则它们在关闭时不会构成漂亮的郁金香形状,甚至会卡住。
相关代码:
#include <Adafruit_TiCoServo.h>
#include "SoftPWM.h"
#define NEOPIXEL_PIN A0
#define TOUCH_SENSOR_PIN 2
#define SERVO_PIN 9
//#define SERVO_OPEN 1750
#define SERVO_OPEN 1650
#define SERVO_SAFE_MIDDLE 1000
#define SERVO_CLOSED 775
#define RED 0
#define GREEN 1
#define BLUE 2
float currentRGB[] = {0, 0, 0};
float changeRGB[] = {0, 0, 0};
byte newRGB[] = {0, 0, 0};
#define MODE_SLEEPING 0
#define MODE_BLOOM 3
#define MODE_BLOOMING 4
#define MODE_BLOOMED 5
#define MODE_FADE 6
#define MODE_FADING 7
#define MODE_FADED 8
#define MODE_FALLINGASLEEP 9
#define MODE_RAINBOW 90
byte mode = MODE_FADED;
byte petalPins[] = {3, 4, 5, 6, 10, 11};
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(7, NEOPIXEL_PIN, NEO_GRB + NEO_KHZ400);
Adafruit_TiCoServo servo;
int servoChange = 1; // open
int servoPosition = SERVO_SAFE_MIDDLE;
void setup() {
Serial.begin(115200);
pixels.begin();
servo.attach(SERVO_PIN, SERVO_CLOSED, SERVO_OPEN);
pinMode(TOUCH_SENSOR_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(TOUCH_SENSOR_PIN), _touchISR, RISING);
randomSeed(analogRead(A7));
SoftPWMBegin();
pixelsUnifiedColor(pixels.Color(0, 0, 0));
//pixelsUnifiedColor(pixels.Color(255, 70, 0));
prepareCrossFade(140, 70, 0, 140);
servo.write(servoPosition);
}
int counter = 0;
byte speed = 15;
void loop() {
boolean done = true;
switch (mode) {
case MODE_BLOOM:
prepareCrossFadeBloom(500);
changeMode(MODE_BLOOMING);
break;
case MODE_BLOOMING:
done = crossFade() && done;
done = openPetals() && done;
done = petalsBloom(counter) && done;
if (done) {
changeMode(MODE_BLOOMED);
}
break;
case MODE_FADE:
//prepareCrossFade(0, 0, 0, 800);
changeMode(MODE_FADING);
break;
case MODE_FADING:
done = crossFade() && done;
done = closePetals() && done;
done = petalsFade(counter) && done;
if (done) {
changeMode(MODE_FADED);
}
break;
case MODE_FADED:
//prepareCrossFade(140, 70, 0, 140);
changeMode(MODE_FALLINGASLEEP);
break;
case MODE_FALLINGASLEEP:
done = crossFade() && done;
done = closePetals() && done;
if (done) {
changeMode(MODE_SLEEPING);
}
break;
case MODE_RAINBOW:
rainbow(counter);
break;
}
counter++;
delay(speed);
}
void changeMode(byte newMode) {
if (mode != newMode) {
mode = newMode;
counter = 0;
}
}
void _touchISR() {
if (mode == MODE_SLEEPING) {
changeMode(MODE_BLOOM);
}
else if (mode == MODE_BLOOMED) {
changeMode(MODE_FADE);
}
}
// petals animations
boolean petalsBloom(int j) {
if (j < 250) {
return false; // delay
}
if (j > 750) {
return true;
}
int val = (j - 250) / 2;
for (int i = 0; i < 6; i++) {
SoftPWMSet(petalPins[i], val);
}
return false;
}
boolean petalsFade(int j) {
if (j > 510) {
return true;
}
for (int i = 0; i < 6; i++) {
SoftPWMSet(petalPins[i], (510 - j) / 2);
}
return false;
}
// animations
void prepareCrossFadeBloom(unsigned int duration) {
byte color = random(0, 5);
switch (color) {
case 0: // white
prepareCrossFade(140, 140, 140, duration);
break;
case 1: // red
prepareCrossFade(140, 5, 0, duration);
break;
case 2: // blue
prepareCrossFade(30, 70, 170, duration);
break;
case 3: // pink
prepareCrossFade(140, 0, 70, duration);
break;
case 4: // orange
prepareCrossFade(255, 70, 0, duration);
break;
}
}
void rainbow(int j) {
uint16_t i;
byte num = pixels.numPixels() - 1;
pixels.setPixelColor(pixels.numPixels() - 1, 100, 100, 100);
for (i = 0; i < num; i++) {
pixels.setPixelColor(i, colorWheel(((i * 256 / num) + j) & 255));
}
pixels.show();
}
// servo function
boolean openPetals() {
if (servoPosition >= SERVO_OPEN) {
return true;
}
servoPosition ++;
servo.write(servoPosition);
return false;
}
boolean closePetals() {
if (servoPosition <= SERVO_CLOSED) {
return true;
}
servoPosition --;
servo.write(servoPosition);
return false;
}
// utility function
void pixelsUnifiedColor(uint32_t color) {
for (unsigned int i = 0; i < pixels.numPixels(); i++) {
pixels.setPixelColor(i, color);
}
pixels.show();
}
void prepareCrossFade(byte red, byte green, byte blue, unsigned int duration) {
float rchange = red - currentRGB[RED];
float gchange = green - currentRGB[GREEN];
float bchange = blue - currentRGB[BLUE];
changeRGB[RED] = rchange / (float) duration;
changeRGB[GREEN] = gchange / (float) duration;
changeRGB[BLUE] = bchange / (float) duration;
newRGB[RED] = red;
newRGB[GREEN] = green;
newRGB[BLUE] = blue;
Serial.print(newRGB[RED]);
Serial.print(" ");
Serial.print(newRGB[GREEN]);
Serial.print(" ");
Serial.print(newRGB[BLUE]);
Serial.print(" (");
Serial.print(changeRGB[RED]);
Serial.print(" ");
Serial.print(changeRGB[GREEN]);
Serial.print(" ");
Serial.print(changeRGB[BLUE]);
Serial.println(")");
}
boolean crossFade() {
if (currentRGB[RED] == newRGB[RED] && currentRGB[GREEN] == newRGB[GREEN] && currentRGB[BLUE] == newRGB[BLUE]) {
return true;
}
for (byte i = 0; i < 3; i++) {
if (changeRGB[i] > 0 && currentRGB[i] < newRGB[i]) {
currentRGB[i] = currentRGB[i] + changeRGB[i];
}
else if (changeRGB[i] < 0 && currentRGB[i] > newRGB[i]) {
currentRGB[i] = currentRGB[i] + changeRGB[i];
}
else {
currentRGB[i] = newRGB[i];
}
}
pixelsUnifiedColor(pixels.Color(currentRGB[RED], currentRGB[GREEN], currentRGB[BLUE]));
/*
Serial.print(currentRGB[RED]);
Serial.print(" ");
Serial.print(currentRGB[GREEN]);
Serial.print(" ");
Serial.print(currentRGB[BLUE]);
Serial.println();
*/
return false;
}
uint32_t colorWheel(byte wheelPos) {
// Input a value 0 to 255 to get a color value.
// The colours are a transition r - g - b - back to r.
wheelPos = 255 - wheelPos;
if (wheelPos < 85) {
return pixels.Color(255 - wheelPos * 3, 0, wheelPos * 3);
}
if (wheelPos < 170) {
wheelPos -= 85;
return pixels.Color(0, wheelPos * 3, 255 - wheelPos * 3);
}
wheelPos -= 170;
return pixels.Color(wheelPos * 3, 255 - wheelPos * 3, 0);
}
Credits将树莓派打造成RFID和NFC的识别装置
用华为和苹果的朋友,应该知道自己的手机上基本都带NFC支付功能。
实际上NFC相关的场景不只是支付,还涵盖我们生活中的方方面面。比如IoT前哨站之前发过的一篇:DIY带数据的NFC“袖扣”。
NFC(近场通信)基于RFID(射频识别)标准,两者都允许设备从被动令牌或电子标签接收数据(这意味着它不需要外部电源即可工作)。
市场上有现成的RFID和NFC识别设备出售,但可定制化程度不高。不过熟悉树莓派的朋友,可以凭借WaveShare的RFID/NFC扩展板,DIY一个更极客的识别装置。

开始之前,你需要一个能跑Raspberry Pi OS Lite(Buster)的树莓派,还有一个WaveShare NFC扩展板(大约人民币几十块)。
登录系统后,先更新系统。
sudo apt -y update && sudo apt -y upgrade
启用串行接口
该扩展版能够通过三个不同的接口进行通信:I2C,SPI和UART。
我们这里使用UART,因为它演示起来最简单。首先运行sudo raspi-config,进入“接口选项”,然后选择“串行接口”。
当系统询问你是否要登录控制台时,请选择“否”。当询问你是否要启用串行接口时,请选择“是”。
你需要立即重启,这将允许WaveShare HAT通过串行接口与我们的Raspberry Pi对话。
配置并安装扩展板
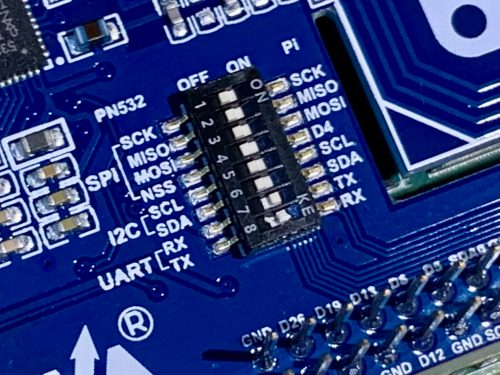
如上所述,我们可以通过更改扩展板本身的某些物理开关来选择不同的接口。默认情况下,我们可以将其配置为UART / Serial,但具体接法最好到以下网址核对:
https://www.waveshare.com/wiki/PN532_NFC_HAT#Raspberry_Pi_examples
一般I1和I0处的跳线均应短接“ L”,D16和D20应短接,在DIP开关上,除RX和TX外,所有其他器件均应关闭。
仔细检查,然后将板子插到树莓派GPIO口上,启动。
sudo apt install rpi.gpio p7zip-full python3-pip
pip3 install spidev pyserial
wget https://www.waveshare.com/w/upload/6/67/Pn532-nfc-hat-code.7z
7z x Pn532-nfc-hat-code.7z
在尝试任何操作之前,需要编辑示例文件,以便我们使用UART。请根据自身要求将其注释或启用。
cd ~/raspberrypi/python
nano example_get_uid.pypn532 = PN532_UART(debug=False, reset=20)

试试看!
如下所示启动示例代码:
python3 example_get_uid.py
如果一切顺利,屏幕将会显示与扩展板连接的信息。
现在,你可以将RFID令牌放在标有“ NFC”的HAT区域上。十六进制数字会开始在屏幕上滚动。这意味着,你的令牌已被检测到!
每个RFID令牌都有唯一的编号,因此可以用来标识不同人员的身份。
但是,该扩展板的功能远不止于此,因为它还支持NFC,并且可以与MIFARE Classic等通用标准进行通信,该标准允许卡上存储1kB的存储空间。
对应的example_dump_mifare.py文件在同一目录中(请确保你已正确设置串行连接)。
更进一步
现在,你可以读取RFID和NFC令牌上的唯一标识符了。
如前所述,如果你用的是MIFARE或NTAG2标准,还可以将数据写到卡上。
examples文件夹包含一些C程序,你可以试一下。
在卡上读取和写入少量数据,可以产生一些有趣的项目。在2018年的电磁场节上,整个游戏都是基于查找物理位置并使用MIFARE卡注册玩家的存在来进行的。
智能手机还可以使用NFC交换任何形式的数据,以及更多可能。
来自:Raspberrypi.org
编译:王文文
用树莓派和Lobe-python做智能垃圾分类
国外一个名叫Jen Fox的创客分享了一个由Raspberry Pi驱动的垃圾分类设备,该设备能告诉我们,当前的垃圾是可回收的,可堆肥的,还是有害的。
这个项目对初学者很友好,因为你不需要任何代码来训练机器学习模型,只需要稍微花点时间就可以将其加载到Raspberry Pi上。
这也是一个相当经济的装置,包括Raspberry Pi 4在内,价格不到70美元。

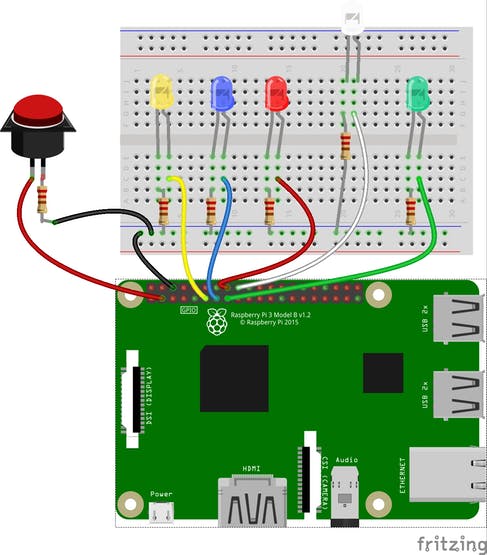
硬件:
Raspberry Pi 4B
树莓派摄像头模块
Adafruit 按钮
Adafruit LED
软件:
免编码的机器学习模型是用Lobe创建的,这是一个免费的桌面应用程序,可根据显示的对象自动训练图像分类器。
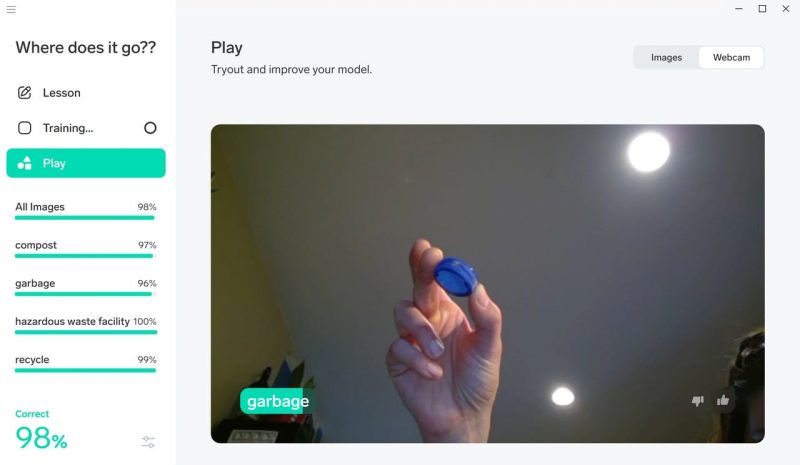
训练图像分类器:
基本上,你要上传一大堆的图片,然后告诉Lobe(分类程序)每一张图片显示的是什么对象。
比如哪些图片是可堆肥垃圾,哪些是可回收利用的物品,哪些是对生物有害的垃圾。当然,正如Jen所说,“你拥有的图片越多,模型识别起来越准确。”
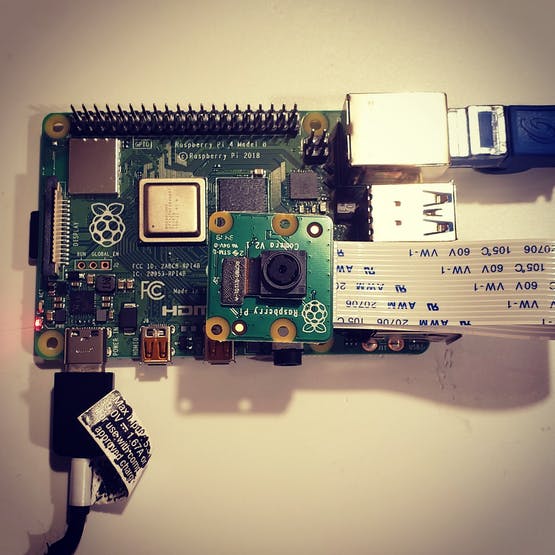
你只需要编写少量代码就可以将图像分类器加载到树莓派上。Raspberry Pi摄像头充当图像分类器的“眼睛”,因此树莓派可以认出你要区分的垃圾种类。
将按钮和LED连接到Raspberry Pi的GPIO引脚,让它们与摄像头一起工作,并根据图像分类器识别“看到”的内容,点亮相应的LED。
当然,你要先找个盒子,最好可以安在墙上。
然后在纸板箱上钻一个方形的孔,以确保摄像头可以“看到”垃圾。
再钻几个孔,以便用户能看到LED灯,并可以接触按钮。
记得为Raspberry Pi的电源留出空间,以便接线。

该项目源码地址:
https://github.com/IoToutpost/TrashClassifier
来自:Raspberrypi.org
编译:王文文
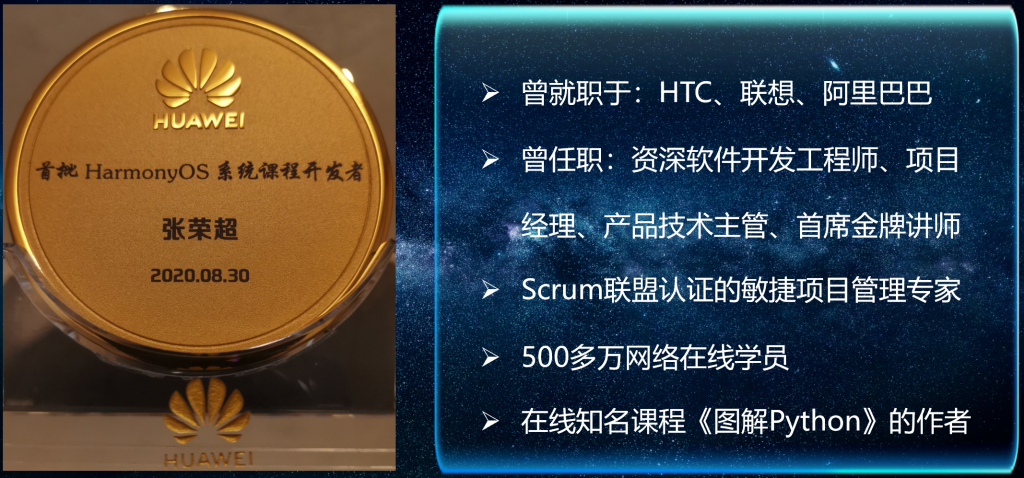
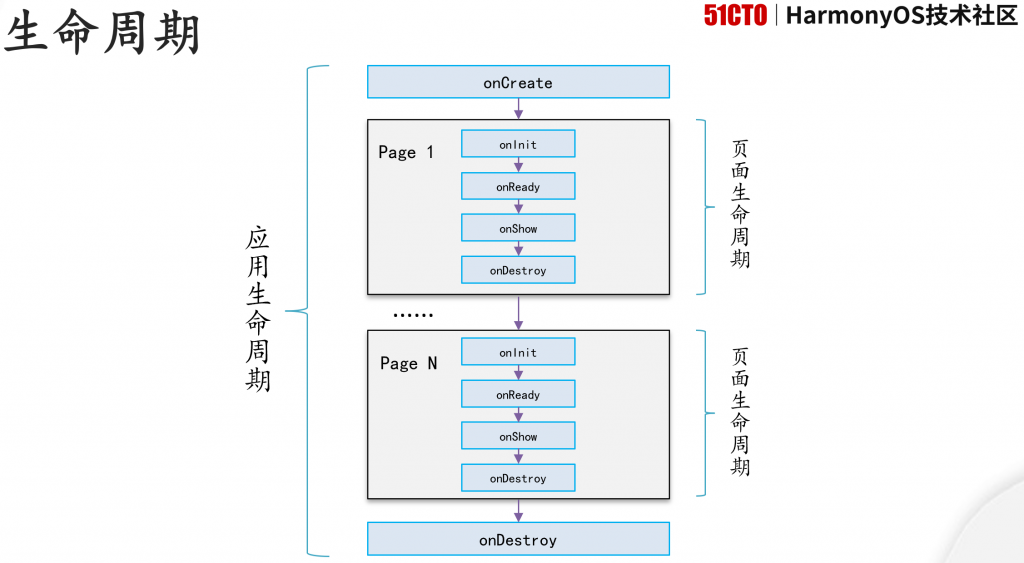
【鸿蒙直播】从零开发鸿蒙小游戏App
2020年11月4日(周三,晚20:00),我将为大家做一场鸿蒙App开发的直播,主题是《从零开发鸿蒙小游戏App》。我会从零开始手把手地带领大家开发一款运行在鸿蒙设备上的、曾经风靡全球的小游戏。我会对编写的每一行代码进行讲解。我们采用边做边学的方式,在做中学,在学中做,在直播过程中完成一个小游戏App的所有功能。

讲师介绍:
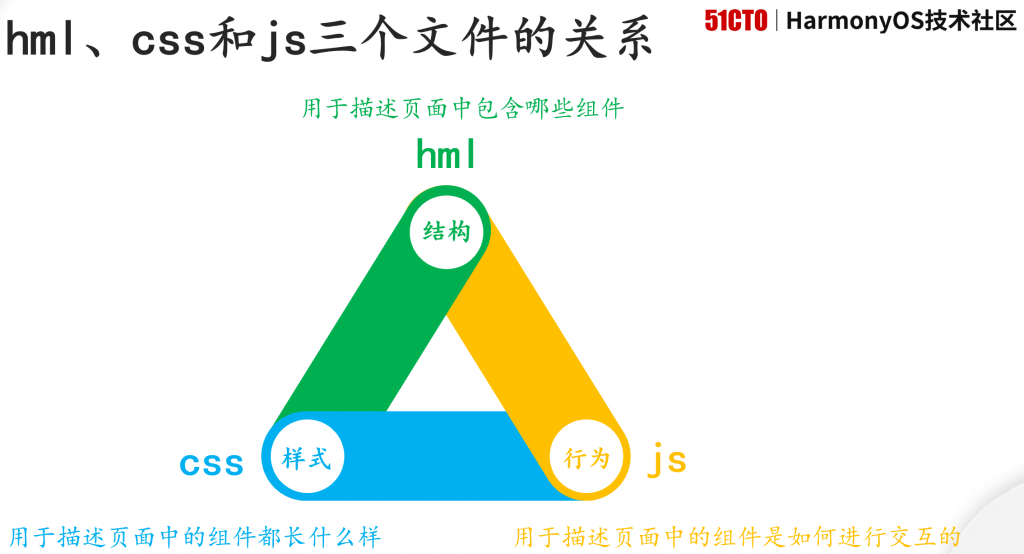
就目前而言,鸿蒙App开发可用的平台有三个:智慧屏、智能手表、运动手表。
如果我们开发的是智慧屏或智能手表上的App,那么目前华为还没有开放基于X86的本机模拟器,因此,需要将编写的代码发送到远程的ARM处理器以运行代码,在本机上只能预览运行结果,而无法在本机上运行和调试代码。
如果我们开发的是运动手表上的App,那么既可以使用本机的预览器Previewer来预览代码的运行效果,也可以使用本机的模拟器simulator来运行和调试代码。在运动手表这个平台上,相关的设备和开发工具是最成熟、最完善的,给开发者的体验已经很棒了!
本次直播主要是在运动手表上使用JavaScript编程语言完成项目的编写,直播后会尽快将Java版的项目代码共享给大家。
学习有礼:
参加HarmonyOS公开课,抽官方定制周边!
官方定制T恤等你来拿!还有机会赢取HarmonyOS官方开发板(HiSpark Wi-Fi IoT 智能家居套件)
直播前导课程:https://edu.51cto.com/course/25054.html
鸿蒙运动手表呼吸训练项目源代码下载:https://harmonyos.51cto.com/posts/1076
Mini Raspberry Pi ——受波士顿动力启发的四足机器人
波士顿动力的机器狗,每次升级都会让大家眼前一亮。

但大家能不能用开源软件DIY一只呢?
一个外国朋友就在Raspberry Pi 3B的基础上开发了“Spot Micro”四足机器人。
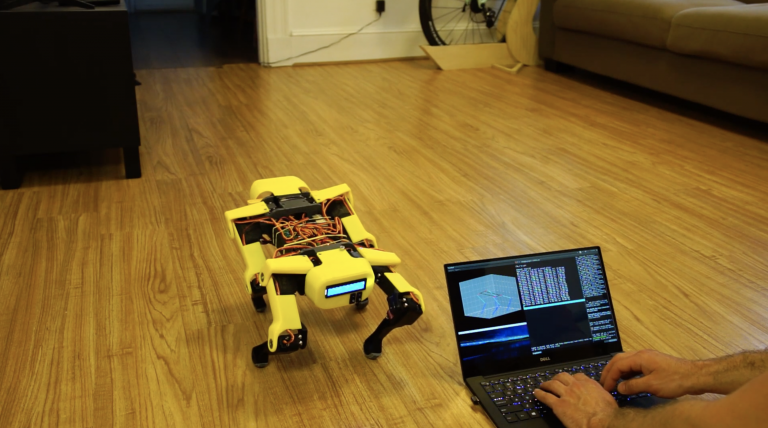
通过构建此项目,redditor/thetrueonion(又名Mike)用C++和Python自学机器人软件开发,让机器人行走并掌握速度和方向控制。
Mike受到了Spot的启发,而Spot是波士顿动力公司为工业开发的机器人之一,可以执行远程操作和自主感应。
它如何行走?
迷你“Spot Micro”机器人通过键盘调整三轴角度命令/身体姿势控制模式,可以实现“步行状态”或“小跑状态”。
前者是一种四阶段步态,一次有两条腿对称运动(就像小跑)。
后者是八阶段步态,一次腿部摆动,并且在两者之间进行身体移动以保持平衡(就像人类走路一样)。
在此广泛的演练中,Mike分解了如何使机器人行走,并按顺序将舵机连接到PCA9685控制板。
操作系统和框架
Ubuntu 16.04 + ROS
用到那些零件?
1、树莓派3B
2、舵机控制板:PCA9685,通过I2C控制
3、舵机:12×PDI-HV5523MG
4、液晶面板:16×2 I2C液晶面板
5、电池:2s 4000 mAh锂电池,直接连接至电源伺服器
6、UBEC:HKU5 5V/5A ubec,作为5V稳压器为Raspberry Pi,LCD面板,PCA9685控制板供电
7、“Spot Micro”的Thingiverse 3D打印文件
代码地址:
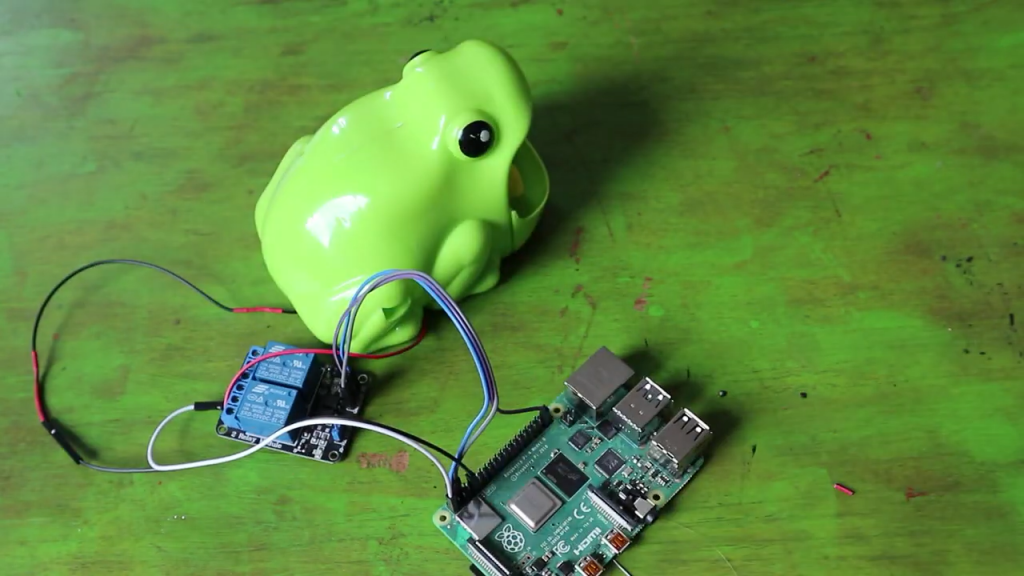
用树莓派驱动的青蛙泡泡机
吹泡泡机可能大家小时候都玩过,加满肥皂液,接上电源以后,它就会自动吹出泡泡。
现在有了树莓派,可以把它改成互联网控制的自动泡泡机了。
改造之前,泡泡机由手动开关控制,该开关可打开或关闭青蛙体内的电机。如果你想看到电机驱动青蛙吹出泡泡,则需要自己轻触此开关。
几个国外的创客制作了这款自动泡泡机,该机器由树莓派供电和控制,并且可以通过互联网启动。
他们选择了青蛙形的泡泡机,但你可以根据自己的喜好重新调整。改造使用两节AA电池运行的模型会更容易。
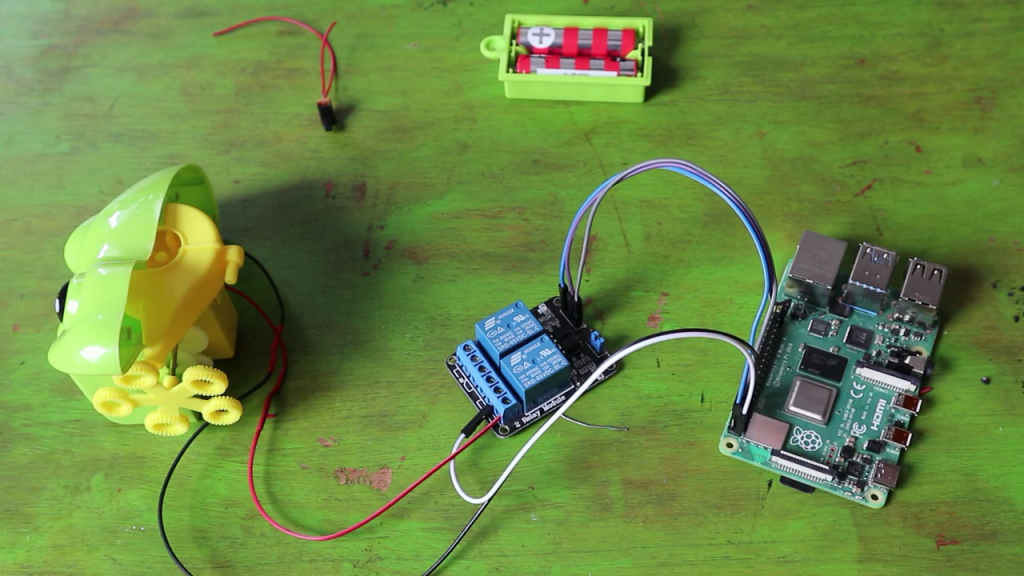
在解剖了“塑料两栖朋友”之后,他们通过继电器模块将其电机连接到Raspberry Pi。他们分享了相关的技术细节,可将继电器模块连接到Raspberry Pi的GPIO引脚。
相关技术介绍:
https://tutorials-raspberrypi.com/raspberry-pi-control-relay-switch-via-gpio
现在,我们可以用代码打开和关闭青蛙体内的马达。
通过在:
这个地址登录,命令Raspberry Pi打开泡泡机的开关。
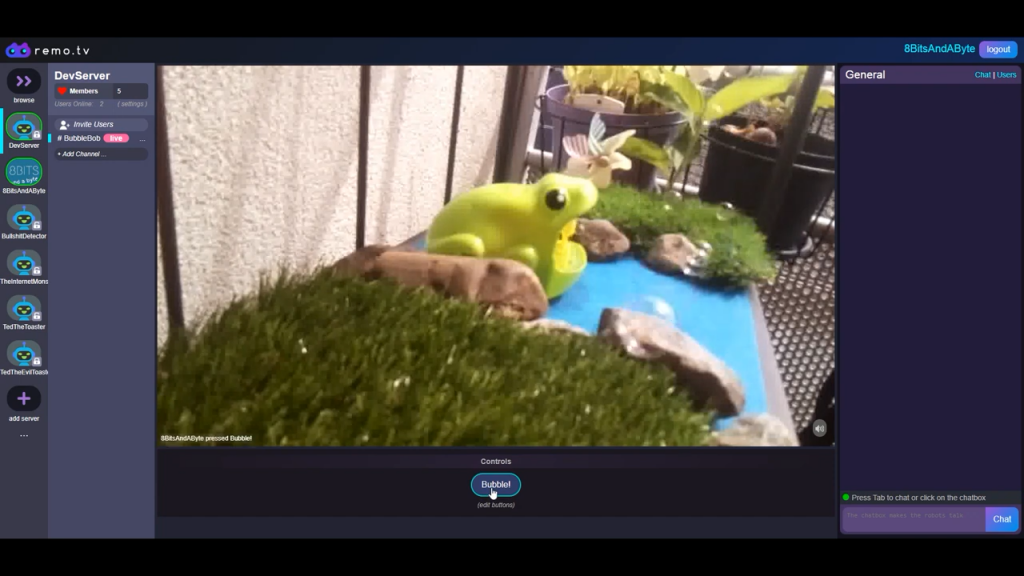
为了让互联网泡泡迷们看到一键劳动的成果,我们设置了Raspberry Pi摄像头模块,并将其构建的装置连接到机器人流媒体平台remo.tv。

别忘了加肥皂水。
用料清单:
泡泡机(最好是用两节AA电池运行的那种)
树莓派
5V继电器模块
Raspberry Pi摄像头模块
Remo.tv帐户
跳线
剩下的问题是:最好的泡沫肥皂配方是什么?
来自:Raspberrypi.org
编译:王文文
如何为树莓派设置SSH的双因素认证
如今,启用双因素身份验证(2FA)来增强帐户的安全性变得越来越普遍。
但是你可能会好奇怎么在Raspberry Pi上启用2FA。当你通过Secure Shell(SSH)远程访问树莓派时,系统将要求你先输入动态验证码。
通过SSH访问Raspberry Pi
很多人在家中将Raspberry Pi用作文件或媒体服务器。随着Raspberry Pi 4的发布,这种情况已经相当普遍,它配备了USB 3.0和千兆以太网。
如果你打算将Raspberry Pi塞到电视后面或其他地方,这意味着你需要在没有监视器,键盘或鼠标的情况下启用Secure Shell(SSH)进行远程访问。
但是,出门在外也想访问文件的需求很常见,所以从Internet访问Raspberry Pi是一件有风险的事。
如果你要对Internet开放你的树莓派服务器,那肯定要增加一些安全性,比如使用基于时间的一次性密码(TOTP)或启用双因素身份验证(2FA )。
什么是双因素身份验证?
双因素身份验证是额外的保护层。是除了密码之外,还需要另一条信息才能登录。
如果说第一个因素是“你知道的东西”,那第二个因素将基于“你拥有的东西”(例如智能手机),就像生物特征信息一样。
我们将继续设置,并将智能手机用作保护Raspberry Pi的第二个因素。
更新操作系统
你应该做的第一件事是确保你的Raspberry Pi OS保持最新。如果你正在运行不够新的操作系统,则可以在命令行操作:
$ sudo apt-get update $ sudo apt-get full-upgrade
启用安全的Shell
Raspbian操作系统在启动时禁用了SSH服务器,如果我们希望通过SSH访问Raspberry Pi,则需要启用它。
启用SSH最简单的方法是先进Raspbian桌面,找到菜单,然后选择“首选项”,Raspberry Pi配置。接下来,选择“Interfaces”选项卡,然后单击按钮启用SSH,再点“确定”。
你还可以在命令行启用它:
$ sudo systemctl enable ssh $ sudo systemctl start ssh
另外,你可以用raspi-config启用SSH ,如果你是首次安装操作系统,也可以在写SD卡时启用SSH 。
启用挑战响应
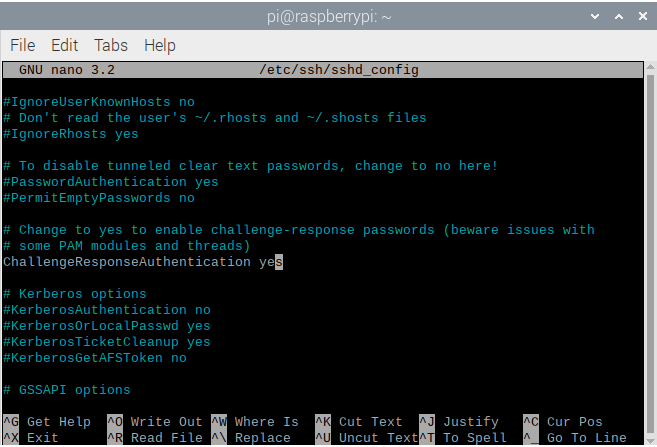
接下来,我们需要告诉SSH守护程序启用“挑战响应”密码。继续打开SSH配置文件:
$ sudo nano /etc/ssh/sshd_config
通过将ChallengeResponseAuthentication从默认的no更改为yes来启用挑战响应。
重启SSH服务
$ sudo systemctl restart ssh
在你的笔记本电脑上打开一个终端,确保你仍然可以SSH到你的树莓派——尽管你还没有被提示输入2FA代码。在这个阶段检查是否一切正常是明智的。
安装双因素身份验证App
你需要做的第一件事是将应用程序下载到手机,该应用程序将生成TOTP。Google身份验证器是最常用的一种。它可用于Android,iOS和Blackberry,甚至在GitHub上也有该应用程序的开源版本。
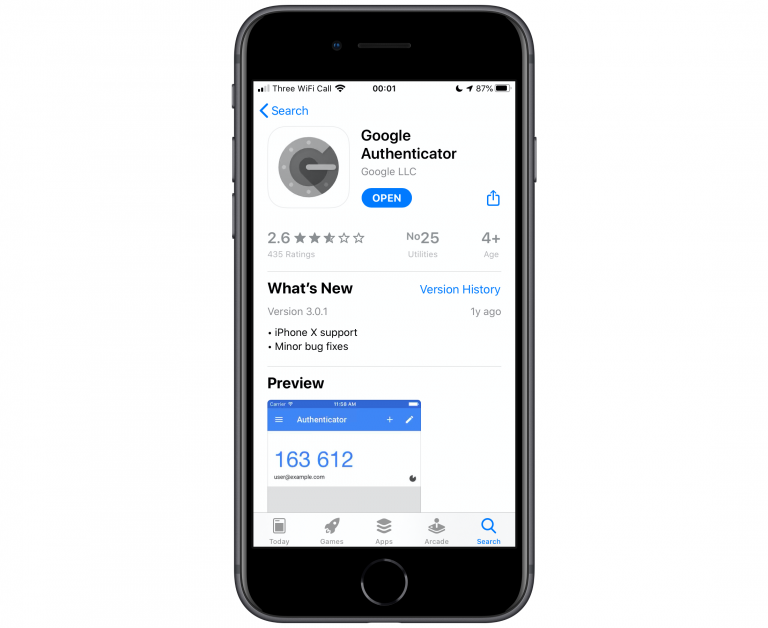
因此,请继续在你的手机上安装Google Authenticator或另一个2FA应用程序,例如Authy。然后,在Raspberry Pi上安装Google Authenticator PAM模块。
$ sudo apt install libpam-google-authenticator
现在我们在手机和Raspberry Pi上都安装了2FA,已经准备好进行配置。
配置两因素身份验证
现在,你应该在Raspberry Pi上运行Google Authenticator而不使用sudo来生成QR码:
$ google-authenticator
之后,你可能需要调整“终端”窗口的大小,以便正确显示QR码。不幸的是,它比标准的80个字符略宽。

此刻先不要下一步! 在执行其他任何操作之前,你应该复制紧急代码并将其放在安全的地方。
这些代码使你可以在丢失手机的情况下访问Raspberry Pi,并关闭2FA。没有它们话,如果你丢失或破坏了用于身份验证的设备,则将无法通过SSH访问Raspberry Pi。
接下来,在我们继续使用Raspberry Pi上的Google Authenticator之前,请在手机上打开Google Authenticator应用,点击右上角的加号(+),然后点击“扫描二维码”。
手机将询问你是否允许该应用访问你的相机;选择“是”,相机镜头将打开,将二维码放置在屏幕上的绿色框中。
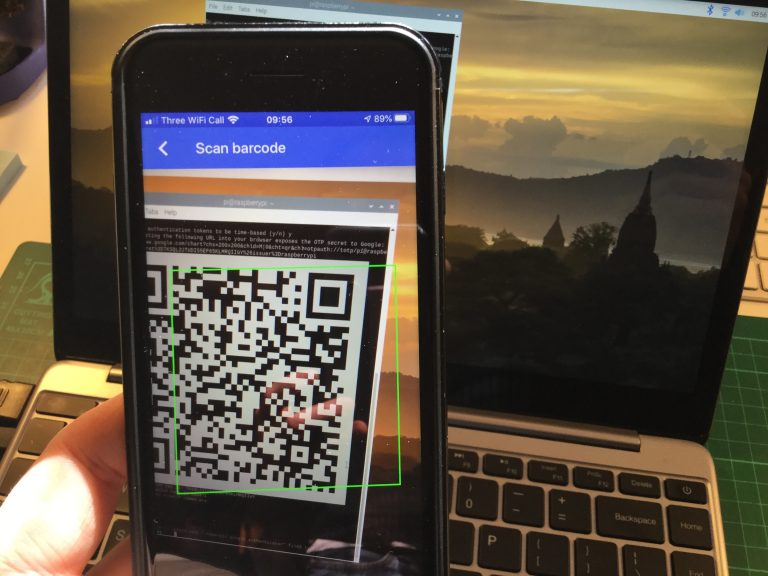
手机应用程序识别出QR码后,就会添加你的新帐户,并会自动开始生成TOTP代码。

你的手机将每三十秒生成一次新的TOTP密码。但是,直到我们完成你在Raspberry Pi上所做的工作,此验证码才有用。
切换到终端窗口,并在询问Google Authenticator是否更新你的.google_authenticator文件时回答“Y” 。
然后回答“Y”以禁止多次使用相同的身份验证令牌,“N”以增加时间偏移窗口,“Y”以限制速率,以防止暴力攻击。
接下来,我们要做的就是启用2FA。
启用双因素身份验证
我们将使用Linux可插拔身份验证模块(PAM),它为应用程序和服务提供动态身份验证支持,以便在Raspberry Pi的SSH上添加2FA。
现在我们需要配置PAM以添加2FA:
$ sudo nano /etc/pam.d/sshd
将必需的auth pam_google_authenticator.so添加到文件顶部。你可以在显示@include common-auth的行上方或下方执行此操作。
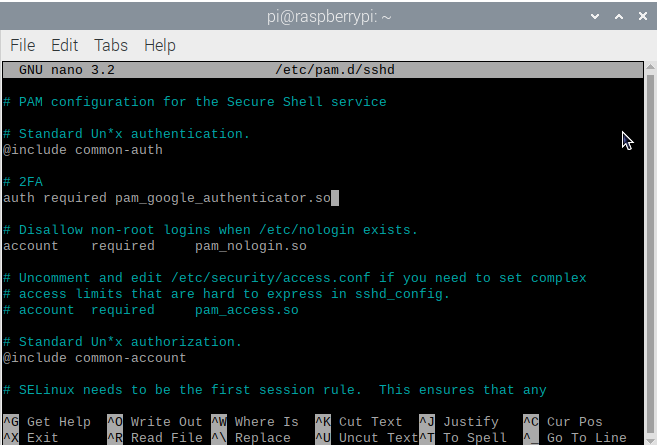
由于我希望在输入密码后提示输入验证码,因此我在@include行之后添加了这一行。如果要在输入密码之前提示输入验证码,则应将其添加到@include行之前。
现在重新启动SSH守护程序:
$ sudo systemctl restart ssh
接下来,在笔记本电脑上打开一个终端窗口,然后尝试用SSH访问Raspberry Pi。
收尾
如果一切都按计划进行,那么当你通过SSH访问Raspberry Pi时,输入密码后应该提示你输入TOTP。
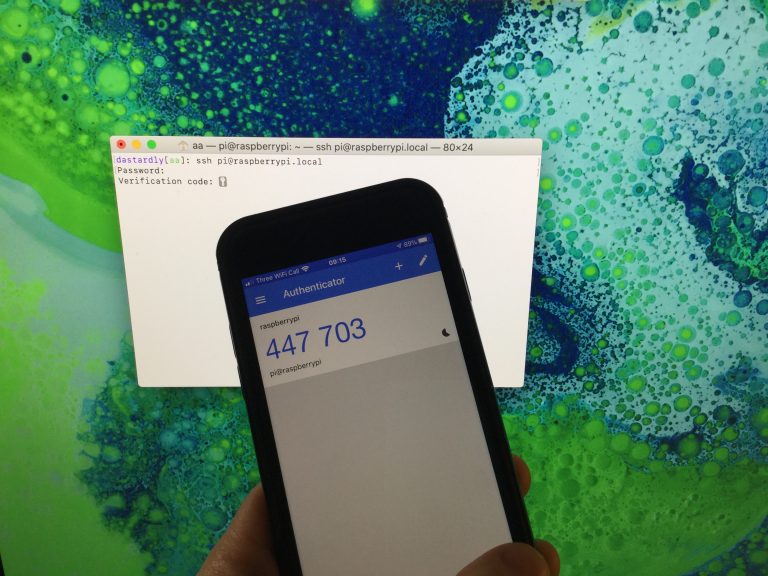
继续打开手机上的Google身份验证器,然后在出现提示时输入六位验证码。登录Raspberry Pi。
无论是SSH还是SCP,设备的安全性都大大提高了。
现在,你已经在手机上装好Google Authenticator应用程序,可以为重要的服务和网站(例如Google,Twitter,Amazon等)启用2FA了,因为大多数网站都已支持双因素验证。
作者:Alasdair Allan
来自:Raspberrypi.org
把网站架在树莓派云上
虽然说树莓派的主战场在物联网和教育,但还是会有人把它用在其他领域。
比如,部署网站。
早在2016年底,Mythic Beasts公司就推出了Raspberry Pi云服务,允许大家租用Raspberry Pi 3作为服务器。
Raspberry Pi 4上市以后,他们的云服务也相应的大幅升级。
毕竟Pi 4的性能是Pi 3的两倍以上,仅内存就四倍(4GB版本的树莓派)。
在获悉Raspberry Pi 4研发完成后,Mythic Beasts公司的皮特·斯蒂文斯(Pete Stevens)跟树莓派创始人埃本·厄普顿(Eben Upton)拿啤酒打赌了。
说他们可以用Raspberry Pi 4搭建服务器,来作为Raspberry Pi 4发布的Web平台。
由于树莓派新版本发布的受欢迎程度,发布日当天的访客不是百万为单位,而是以千万为单位。
因此,服务的稳定至关重要。
2019年6月20日星期四,埃本把18台4GB内存的Raspberry Pi 4交给皮特团队,以替换Raspberry Pi官方博客的所有Web服务器(x86)。
- 14×动态Web服务器(PHP / Apache)
- 2个静态Web服务器(Apache,静态文件)
- 2个Memcache(在内存中加速Web服务)
他们在6月21日周五构建时,立即遇到了一个“鸡和蛋”的问题。
树莓派官网的Web服务器是通过Puppet构建的,当时基于Debian Jessie。
Raspberry Pi 4(服务器)上的系统是Debian Buster尚未发行的版本,当时Puppet不支持该版本。
然后皮特团队与Raspberry Pi基金会的Greg Annandale一起,创建了可以在Raspberry Pi 4上运行的Puppet,将配置从Debian Jessie升级到Buster(这个版本有新的Apache/ PHP),并进行了测试。
关于机箱和布线
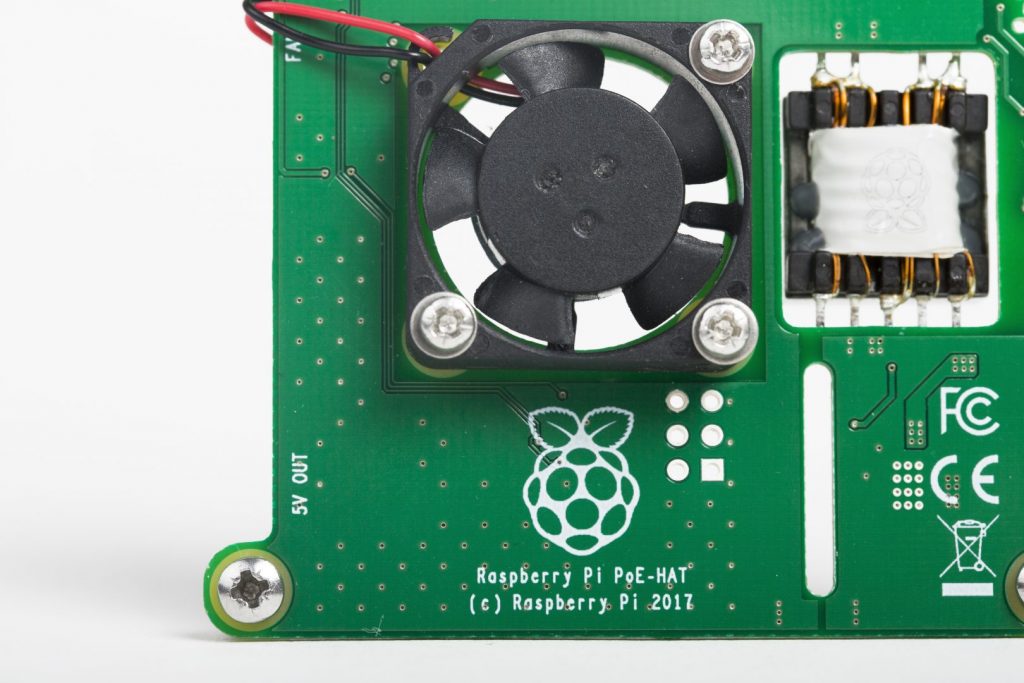
早在搭建Raspberry Pi 3云的时候,皮特团队就做了对应的机箱。
然后他们采用了相同的方法,用POE扩展板供电的方式,为每台Raspberry Pi 4提供电源和网络。这大大降低了布线和设置的复杂性。
6月21日周五晚上21点,也就是皮特团队开工的24小时后,他们将快速打造的Raspberry Pi 4集群移至Sovereign House,这里是Mythic Beasts数据中心所在地,也是欧洲网络最好的区域之一。
在几个小时的时间里,皮特团队逐步将整个生产环境从现有的虚拟服务器转移到Raspberry Pi 4云,直到树莓派官方博客的每个页面都由Raspberry Pi 4集群提供服务。

真正的考验,发布日。
Raspberry Pi 4发布当天,树莓派集群扛住了数千万用户的访问。
皮特团队在树莓派集群和网站的前端设置了Cloudflare,它为静态资源提供加速,并保护网站免遭拒绝服务攻击。
不幸的是,他们在发布过程中宕机了两个小时,原因是威瑞森(Verizon)的客户运行了一个配置错误的网络优化器。所以树莓派4集群有一个漫长的午休时间……
详细信息可访问:
https://www.cloudflarestatus.com/incidents/46z55mdhg0t5
随后,皮特团队让树莓派官网在Raspberry Pi 4集群上跑了一个多月,然后才换回之前的虚拟服务器。
他们证明了树莓派4可以是一个很棒的网站部署平台。
编者按:不知道啤酒有没有赢到。
将Raspberry Pi 4云服务商业化
皮特团队已经为一些客户提供Raspberry Pi 3的云服务(例如PiWheels,它为Raspberry Pi构建Python软件包),而且能够按需启动Raspberry Pi 3对客户极为有用。
由于SD卡并不是很可靠。每次出现故障时,人工干预不仅耗时间,还意味着皮特团队必须物理接触树莓派云中的每一块板子。
所以皮特团队选择了Netboot加网络存储的方式,不但可以远程开机,还可以远程re-image树莓派。避开了一些坑。
他们在2019年11月采用了Beta版固件,并构建了一个Raspberry Pi 4网络启动设置的示例。
然后把它集成到管理程序,构建与Raspberry Pi 4兼容的操作系统镜像。并增强了账单和计费的功能,以应对多种模型和按小时计费。
然后,他们又不得不对文件服务器和网络进行了升级。
因为树莓派4B是“真”千兆网卡,需要提供比Raspberry Pi 3更强的支持。
当然,皮特团队也做了向后兼容,以免影响现在Raspberry Pi 3云的用户。
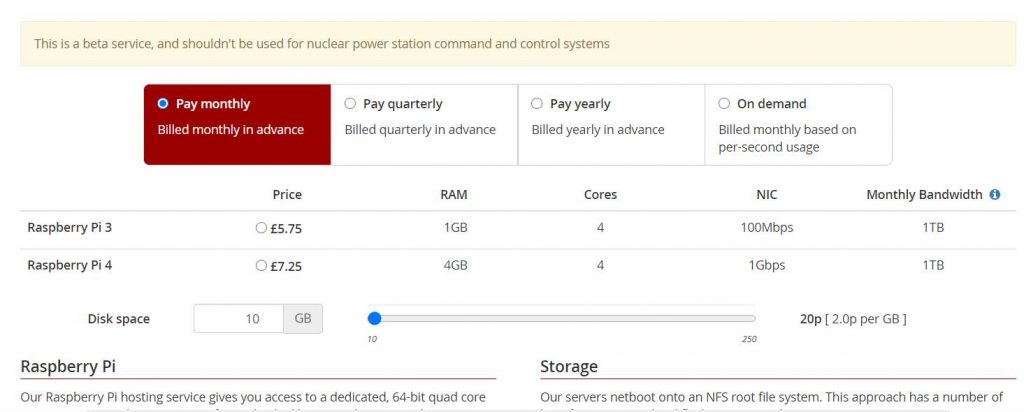
2020年6月17日,皮特团队上线了 Raspberry Pi 4的云,正式向客户提供服务。
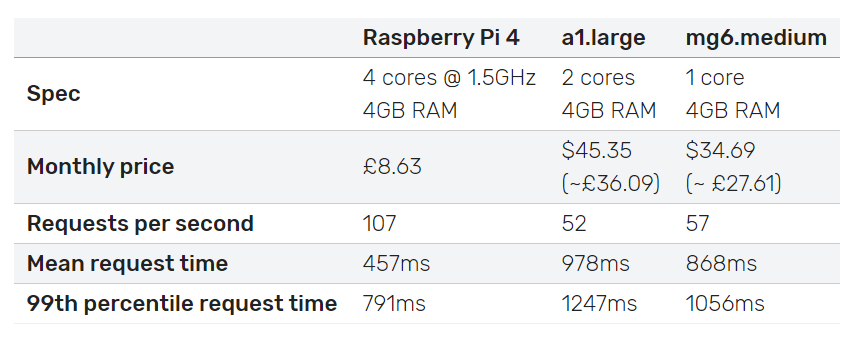
Mythic Beast自己公布的和AWS类似业务对比:
估计再过一段时间,他们的云该提供8GB内存的硬件版本和64位Raspberry Pi操作系统了。
目前市面上流行的ARM云服务器,主要有华为鲲鹏和AWS Graviton。
线索:Raspberrypi.org
编译:王文文