编者注:这是一个名叫JiříPraus的外国小哥实现的Arduino创意作品,实际上是“郁金香”,但看着太像中国神话故事里的“宝莲灯”了。
轻轻抚摸就会绽放,它的六个花瓣将缓慢打开并照耀出彩虹般的光。当花瓣闭合时,它们会产生令人难以置信的带有叶子图案的光。

所需材料:
Arduino Nano R3
SG90微型伺服电机
TTP223触摸传感器
1mm黄铜丝
2mm黄铜管
0.3mm绝缘铜线
WS2812 5050 NeoPixel LED灯 x 7
白色SMD 1206 LED x 30
附注:如何焊接黄铜
https://davidneat.wordpress.com/2015/05/03/a-quick-guide-to-soldering-brass/amp/
推杆如何与花瓣一起运动
当推杆向上移动时,它将连杆和花瓣向下拉。当它向下移动时,它拖着连杆,将花瓣闭合。
单片花瓣的构成:
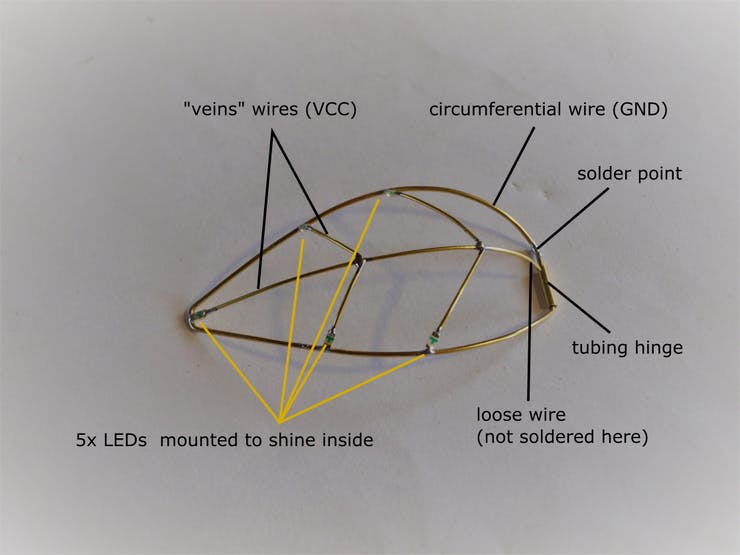
花瓣由黄铜细条组成,花瓣内有5个白色LED和同一根导线构成的“静脉”结构。
相同的花瓣,一共要做6个。否则它们在关闭时不会构成漂亮的郁金香形状,甚至会卡住。
相关代码:
#include <Adafruit_TiCoServo.h>
#include "SoftPWM.h"
#define NEOPIXEL_PIN A0
#define TOUCH_SENSOR_PIN 2
#define SERVO_PIN 9
//#define SERVO_OPEN 1750
#define SERVO_OPEN 1650
#define SERVO_SAFE_MIDDLE 1000
#define SERVO_CLOSED 775
#define RED 0
#define GREEN 1
#define BLUE 2
float currentRGB[] = {0, 0, 0};
float changeRGB[] = {0, 0, 0};
byte newRGB[] = {0, 0, 0};
#define MODE_SLEEPING 0
#define MODE_BLOOM 3
#define MODE_BLOOMING 4
#define MODE_BLOOMED 5
#define MODE_FADE 6
#define MODE_FADING 7
#define MODE_FADED 8
#define MODE_FALLINGASLEEP 9
#define MODE_RAINBOW 90
byte mode = MODE_FADED;
byte petalPins[] = {3, 4, 5, 6, 10, 11};
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(7, NEOPIXEL_PIN, NEO_GRB + NEO_KHZ400);
Adafruit_TiCoServo servo;
int servoChange = 1; // open
int servoPosition = SERVO_SAFE_MIDDLE;
void setup() {
Serial.begin(115200);
pixels.begin();
servo.attach(SERVO_PIN, SERVO_CLOSED, SERVO_OPEN);
pinMode(TOUCH_SENSOR_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(TOUCH_SENSOR_PIN), _touchISR, RISING);
randomSeed(analogRead(A7));
SoftPWMBegin();
pixelsUnifiedColor(pixels.Color(0, 0, 0));
//pixelsUnifiedColor(pixels.Color(255, 70, 0));
prepareCrossFade(140, 70, 0, 140);
servo.write(servoPosition);
}
int counter = 0;
byte speed = 15;
void loop() {
boolean done = true;
switch (mode) {
case MODE_BLOOM:
prepareCrossFadeBloom(500);
changeMode(MODE_BLOOMING);
break;
case MODE_BLOOMING:
done = crossFade() && done;
done = openPetals() && done;
done = petalsBloom(counter) && done;
if (done) {
changeMode(MODE_BLOOMED);
}
break;
case MODE_FADE:
//prepareCrossFade(0, 0, 0, 800);
changeMode(MODE_FADING);
break;
case MODE_FADING:
done = crossFade() && done;
done = closePetals() && done;
done = petalsFade(counter) && done;
if (done) {
changeMode(MODE_FADED);
}
break;
case MODE_FADED:
//prepareCrossFade(140, 70, 0, 140);
changeMode(MODE_FALLINGASLEEP);
break;
case MODE_FALLINGASLEEP:
done = crossFade() && done;
done = closePetals() && done;
if (done) {
changeMode(MODE_SLEEPING);
}
break;
case MODE_RAINBOW:
rainbow(counter);
break;
}
counter++;
delay(speed);
}
void changeMode(byte newMode) {
if (mode != newMode) {
mode = newMode;
counter = 0;
}
}
void _touchISR() {
if (mode == MODE_SLEEPING) {
changeMode(MODE_BLOOM);
}
else if (mode == MODE_BLOOMED) {
changeMode(MODE_FADE);
}
}
// petals animations
boolean petalsBloom(int j) {
if (j < 250) {
return false; // delay
}
if (j > 750) {
return true;
}
int val = (j - 250) / 2;
for (int i = 0; i < 6; i++) {
SoftPWMSet(petalPins[i], val);
}
return false;
}
boolean petalsFade(int j) {
if (j > 510) {
return true;
}
for (int i = 0; i < 6; i++) {
SoftPWMSet(petalPins[i], (510 - j) / 2);
}
return false;
}
// animations
void prepareCrossFadeBloom(unsigned int duration) {
byte color = random(0, 5);
switch (color) {
case 0: // white
prepareCrossFade(140, 140, 140, duration);
break;
case 1: // red
prepareCrossFade(140, 5, 0, duration);
break;
case 2: // blue
prepareCrossFade(30, 70, 170, duration);
break;
case 3: // pink
prepareCrossFade(140, 0, 70, duration);
break;
case 4: // orange
prepareCrossFade(255, 70, 0, duration);
break;
}
}
void rainbow(int j) {
uint16_t i;
byte num = pixels.numPixels() - 1;
pixels.setPixelColor(pixels.numPixels() - 1, 100, 100, 100);
for (i = 0; i < num; i++) {
pixels.setPixelColor(i, colorWheel(((i * 256 / num) + j) & 255));
}
pixels.show();
}
// servo function
boolean openPetals() {
if (servoPosition >= SERVO_OPEN) {
return true;
}
servoPosition ++;
servo.write(servoPosition);
return false;
}
boolean closePetals() {
if (servoPosition <= SERVO_CLOSED) {
return true;
}
servoPosition --;
servo.write(servoPosition);
return false;
}
// utility function
void pixelsUnifiedColor(uint32_t color) {
for (unsigned int i = 0; i < pixels.numPixels(); i++) {
pixels.setPixelColor(i, color);
}
pixels.show();
}
void prepareCrossFade(byte red, byte green, byte blue, unsigned int duration) {
float rchange = red - currentRGB[RED];
float gchange = green - currentRGB[GREEN];
float bchange = blue - currentRGB[BLUE];
changeRGB[RED] = rchange / (float) duration;
changeRGB[GREEN] = gchange / (float) duration;
changeRGB[BLUE] = bchange / (float) duration;
newRGB[RED] = red;
newRGB[GREEN] = green;
newRGB[BLUE] = blue;
Serial.print(newRGB[RED]);
Serial.print(" ");
Serial.print(newRGB[GREEN]);
Serial.print(" ");
Serial.print(newRGB[BLUE]);
Serial.print(" (");
Serial.print(changeRGB[RED]);
Serial.print(" ");
Serial.print(changeRGB[GREEN]);
Serial.print(" ");
Serial.print(changeRGB[BLUE]);
Serial.println(")");
}
boolean crossFade() {
if (currentRGB[RED] == newRGB[RED] && currentRGB[GREEN] == newRGB[GREEN] && currentRGB[BLUE] == newRGB[BLUE]) {
return true;
}
for (byte i = 0; i < 3; i++) {
if (changeRGB[i] > 0 && currentRGB[i] < newRGB[i]) {
currentRGB[i] = currentRGB[i] + changeRGB[i];
}
else if (changeRGB[i] < 0 && currentRGB[i] > newRGB[i]) {
currentRGB[i] = currentRGB[i] + changeRGB[i];
}
else {
currentRGB[i] = newRGB[i];
}
}
pixelsUnifiedColor(pixels.Color(currentRGB[RED], currentRGB[GREEN], currentRGB[BLUE]));
/*
Serial.print(currentRGB[RED]);
Serial.print(" ");
Serial.print(currentRGB[GREEN]);
Serial.print(" ");
Serial.print(currentRGB[BLUE]);
Serial.println();
*/
return false;
}
uint32_t colorWheel(byte wheelPos) {
// Input a value 0 to 255 to get a color value.
// The colours are a transition r - g - b - back to r.
wheelPos = 255 - wheelPos;
if (wheelPos < 85) {
return pixels.Color(255 - wheelPos * 3, 0, wheelPos * 3);
}
if (wheelPos < 170) {
wheelPos -= 85;
return pixels.Color(0, wheelPos * 3, 255 - wheelPos * 3);
}
wheelPos -= 170;
return pixels.Color(wheelPos * 3, 255 - wheelPos * 3, 0);
}
Credits