波士顿动力的机器狗,每次升级都会让大家眼前一亮。

但大家能不能用开源软件DIY一只呢?
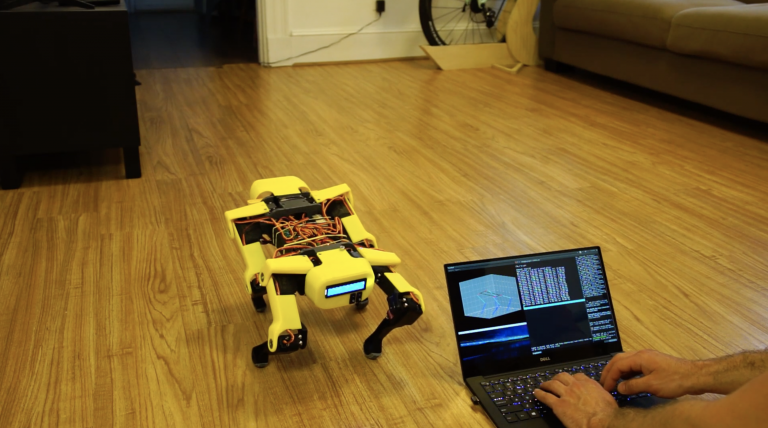
一个外国朋友就在Raspberry Pi 3B的基础上开发了“Spot Micro”四足机器人。
通过构建此项目,redditor/thetrueonion(又名Mike)用C++和Python自学机器人软件开发,让机器人行走并掌握速度和方向控制。
Mike受到了Spot的启发,而Spot是波士顿动力公司为工业开发的机器人之一,可以执行远程操作和自主感应。
它如何行走?
迷你“Spot Micro”机器人通过键盘调整三轴角度命令/身体姿势控制模式,可以实现“步行状态”或“小跑状态”。
前者是一种四阶段步态,一次有两条腿对称运动(就像小跑)。
后者是八阶段步态,一次腿部摆动,并且在两者之间进行身体移动以保持平衡(就像人类走路一样)。
在此广泛的演练中,Mike分解了如何使机器人行走,并按顺序将舵机连接到PCA9685控制板。
操作系统和框架
Ubuntu 16.04 + ROS
用到那些零件?
1、树莓派3B
2、舵机控制板:PCA9685,通过I2C控制
3、舵机:12×PDI-HV5523MG
4、液晶面板:16×2 I2C液晶面板
5、电池:2s 4000 mAh锂电池,直接连接至电源伺服器
6、UBEC:HKU5 5V/5A ubec,作为5V稳压器为Raspberry Pi,LCD面板,PCA9685控制板供电
7、“Spot Micro”的Thingiverse 3D打印文件
代码地址: