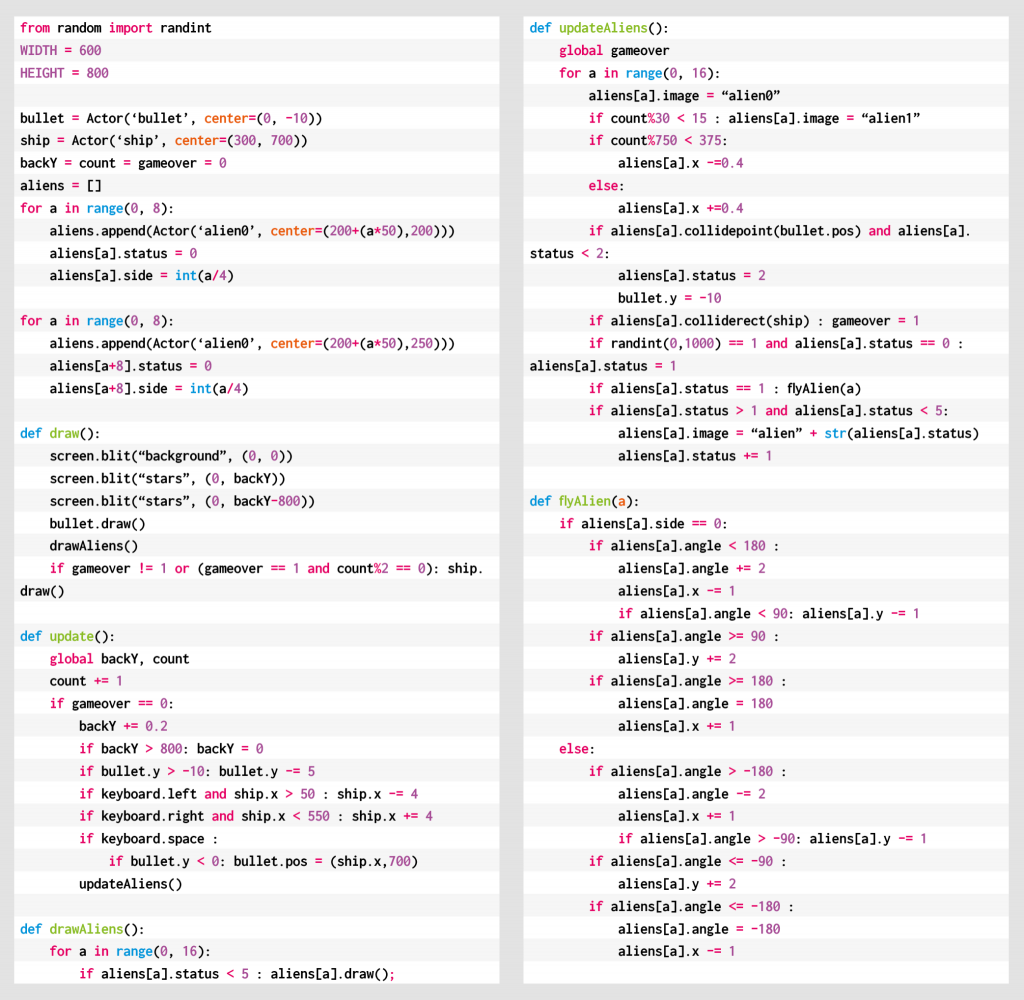
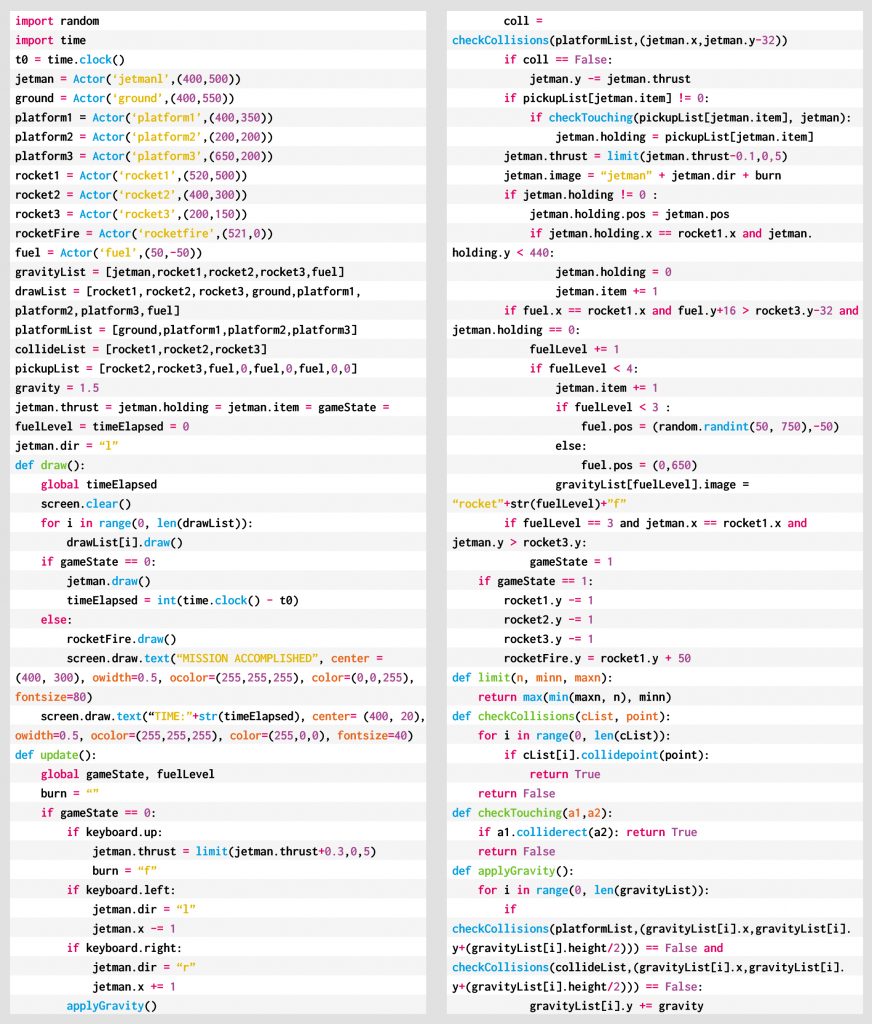
Julia是一款开源通用编程语言,专为科学计算而设计。它结合了 Python 和 Ruby 等高级语言的易用性,以及 C 的速度。Julia 是大学开发研究的理想选择,从本科到博士都可以考虑它。
其实在2017年,该语言的创造者之一Viral Shah就跟 Raspberry Pi 基金会取得了联系,并将 Julia 移植到了 ARM 平台,特别是针对 Raspberry Pi。从那时起,他们出色的完成了对 ARM 平台以及树莓派的支持。
而树莓派基金会也将Julia正式的纳入了Raspberry Pi OS的软件库,大家可以直接用APT安装了。
现在Julia 团队不仅将语言本身移植到 Pi,而且还增加了对GPIO、Sense HAT和Minecraft的支持。
Julia 开发人员之一 Simon 首先将 Julia 徽标加载到Jupyter 笔记本中的矩阵,然后将其显示在 Sense HAT LED 矩阵上。然后他做了一些矩阵变换,Sense HAT 显示了这些操作的效果。
可以使用以下命令在 Raspberry Pi 上安装 Julia:
sudo apt update
sudo apt install julia为 Julia 安装 Jupyter notebook:
sudo apt install julia libzmq3-dev python3-zmq
sudo pip3 install jupyter
julia -e 'Pkg.add("IJulia");'也可以从 Julia 控制台轻松安装额外的软件包:
Pkg.add("SenseHat")Julia 团队还创建了一个资源网站,用于在 Pi 上开始使用 Julia:juliaberry.github.io

好了,Julia开发者们。在树莓派上用起来吧。