如果你曾经想在 Raspberry Pi 5 上尝试神经网络、人工智能和机器学习的世界,树莓派这次推出了官方AI 套件。该 AI 套件是与 Hailo 合作开发的,它可将本地高效的推理能力,集成到各种应用程序中。现已上架 Raspberry Pi 的经销商网络,价格 70 美元。
Raspberry Pi AI 套件拆解
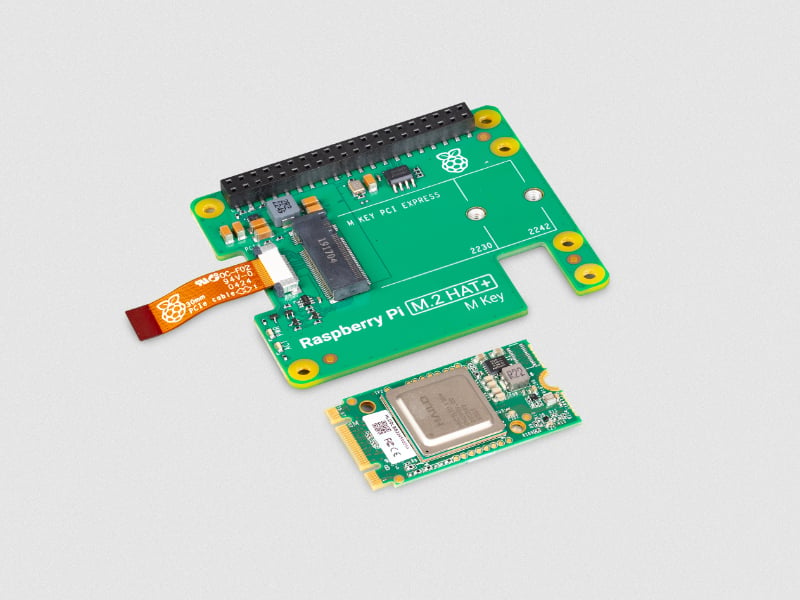
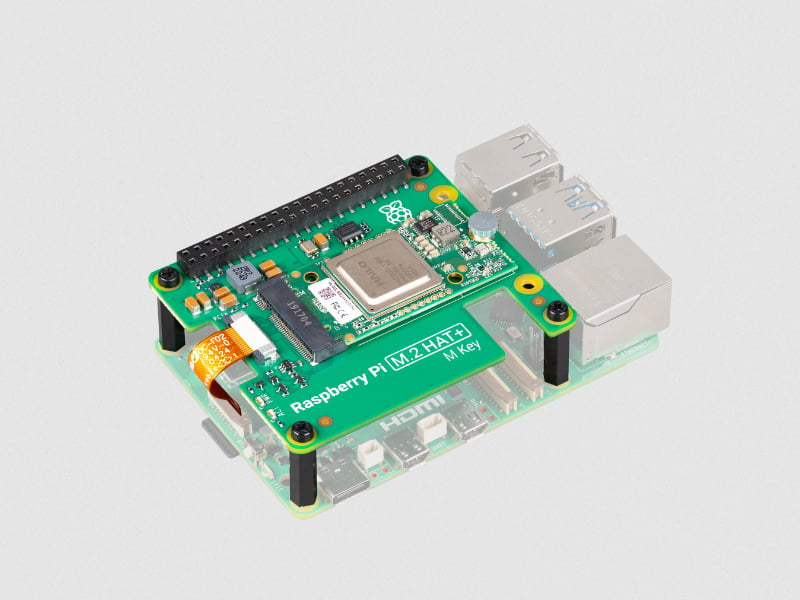
Raspberry Pi AI 套件包括我们的 M.2 HAT+ 和 Hailo-8L AI 加速器模块。AI 套件安装在 Raspberry Pi 5 上,可让你快速构建复杂的 AI 视觉应用程序,实时运行。具有低延迟和低功耗要求。用于对象检测、语义和实例分割、姿态估计和面部识别(仅举几例)的先进神经网络完全在 Hailo-8L 协处理器上运行,使 Raspberry Pi 5 CPU 可以自由地执行其它任务。
预计这项投资案将进一步巩固双方自 2008 年开启的伙伴关系,让树莓派可以为学生、技术爱好者与商业开发人员推出更多受欢迎的 Arm 架构产品。
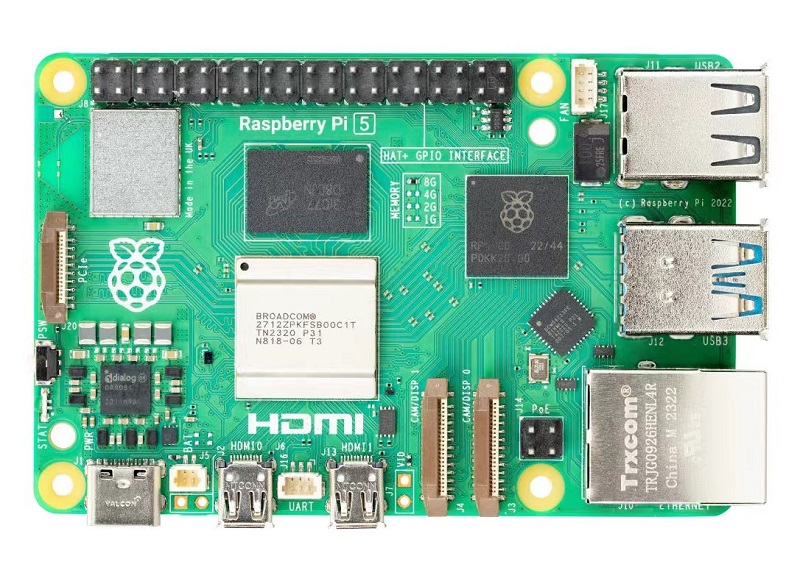
比如2023年10月底上市的树莓派旗舰 Raspberry Pi 5,就是基于Arm架构,目前最先进的一款树莓派产品。
Arm物联网业务线高级副总裁兼总经理Paul Williamson表示:“Arm和树莓派有一个共同的愿景,即:通过降低创新门槛,使所有人都获得计算能力。让任何地方的任何人都可以学习、体验和创造新的物联网解决方案。 基于 Arm 架构,开发人员能够更快、更轻松地进行创新,这对于推动全球高性能物联网设备的应用至关重要。这项战略投资进一步证明了我们对开发者社区以及树莓派伙伴关系的持续承诺。”
树莓派首席执行官Eben Upton表示:“Arm技术一直是我们平台的核心,这项投资也是我们长期合作伙伴关系的一个重要里程碑。我们将继续为每一位玩家降低门槛,不管是学生和技术爱好者,还是大规模部署商业系统的专业开发人员。采用 Arm 技术作为当前和未来产品的基础,将使我们能够获得所需的计算性能、能效和广泛的软件生态系统,”