随着5G网络的到来,很多人都会觉得Wi-Fi的重要性是不是没那么大了?
事实上, Wi-Fi也在紧锣密鼓的升级。
20多年以来,从2G到5G,移动网络的传输速率提升了近20倍。而Wi-Fi网络,也从曾经的802.11a,发展到802.11ax,也就是传说中的Wi-Fi 6,即将进入我们的日常生活。
其带宽、网络容量、覆盖范围等等指标都有大幅度的提升。技术的进步也将为我们的生活带来更多的方便,比如物联网的普及等等。
Wi-Fi 联盟即将在 2019 年 8 月敲定最新的 Wi-Fi 6(又称 802.11ax)无线网络标准。
为抢占先机,高通和联发科等厂商都在抓紧部署“准备就绪”的 Wi-Fi 6 路由器和终端。
比如高通的 QCA6390 芯片组。在启用 1024-QAM 双频段的情况下(5GHz + 2.4GHz / 80MHz 频宽),可提供高达 1.8Gbps 的 Wi-Fi 6 带宽。
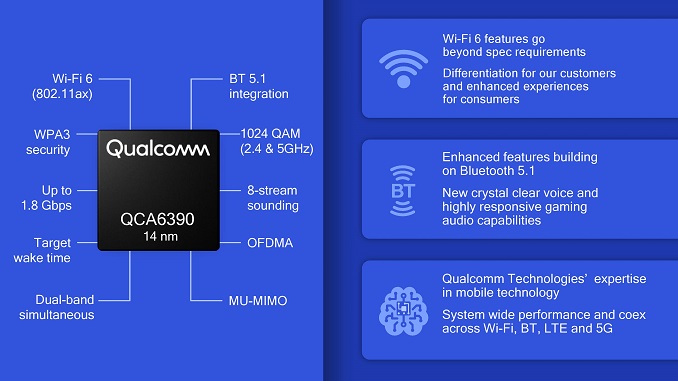
Wi-Fi 6的特性,主要包括网络中单一终端吞吐量的提升、覆盖范围的扩大、联网终端更久的电池续航,以及对于最新安全协议WPA3的支持。
对于5G传输速度的飞跃,用户对于数据传输的速度需求会提升,因此Wi-Fi也必须进行升级,才能满足广大用户的需求。
众所周知,5G有eMBB,mMTC 和URLLC三大场景,Wi-Fi 6的方向也是类似的。Wi-Fi 6 优化了设备的的覆盖能力,可以让更多人同时使用,可以更好的支持智慧家庭、工业物联网等应用。
“当你身处东京火车站,挤在人群里看超级碗时,这些环境下的Wi-Fi体验将发生彻底改变,”Wi-Fi联盟营销副总裁凯文·罗宾逊(Kevin Robinson)表示。
当然,每一项新技术的落地,都需要有具体的行业标准来支撑。近日,Wi-Fi联盟已推出针对支持Wi-Fi 6标准的设备认证计划,预计将从2019年第三季度开始。
据悉,这一名为“Wi-Fi Certified 6”的认证计划,旨在确保基于下一代Wi-Fi技术打造的各种设备符合互操作性和安全性的行业标准。Wi-Fi联盟表示,该认证计划将为用户提供流媒体超高清电影甚至关键业务应用所需的容量、覆盖范围和性能。
Wi-Fi Certified 6支持使用MU-MIMO、波束成型和1024-QUAM等技术带来的更高数据传输速率和更大网络容量在内的高级功能。其他功能还包括在拥塞环境中提高性能,以及利用目标唤醒时间(TWT)提高电池寿命实现更高功效等。
ABI Research高级研究分析师Andrew Zignani在一份声明中表示:“Wi-Fi仍然是访问接入互联网的主要技术,它有着悠久的成功历史。Wi-Fi Certified 6将进一步提升Wi-Fi的作用,预计2022年Wi-Fi 6芯片组出货量将超过10亿。”
原作: 半导体观察
原文:https://www.jianshu.com/p/af2bf20d57a4
整理:IoT前哨站