这里的AVH是指Arm Virtual Hardware,可以在线访问的虚拟开发板。
AVH支持两种模式远程登录内网的主机。
一是OpenVPN,下载配置文件导入即可。
二是SSH,添加密钥后即可。
OpenVPN的比较傻瓜,这里就不赘述了。
SSH的话,可以用以下命令:
ssh -J c9922a0f-edcb-486d-b84f-9508262abeb1@proxy.app.avh.arm.com pi@10.11.0.1
你也可以使用~/.ssh/config提前配置好跳转主机。
物联网相关的应用、开发资讯,IoT智能装置和云端结合的技术研究,新鲜事物的分享。
这里的AVH是指Arm Virtual Hardware,可以在线访问的虚拟开发板。
AVH支持两种模式远程登录内网的主机。
一是OpenVPN,下载配置文件导入即可。
二是SSH,添加密钥后即可。
OpenVPN的比较傻瓜,这里就不赘述了。
SSH的话,可以用以下命令:
ssh -J c9922a0f-edcb-486d-b84f-9508262abeb1@proxy.app.avh.arm.com pi@10.11.0.1
你也可以使用~/.ssh/config提前配置好跳转主机。
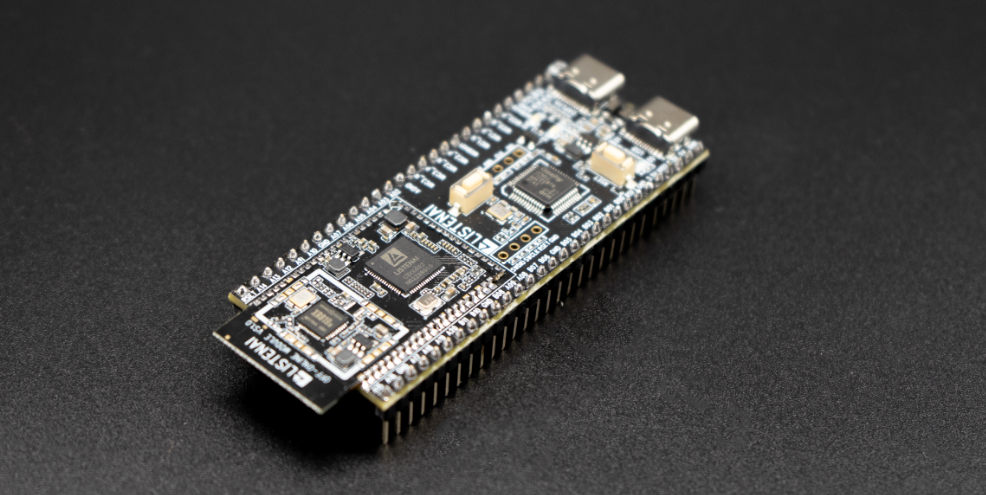
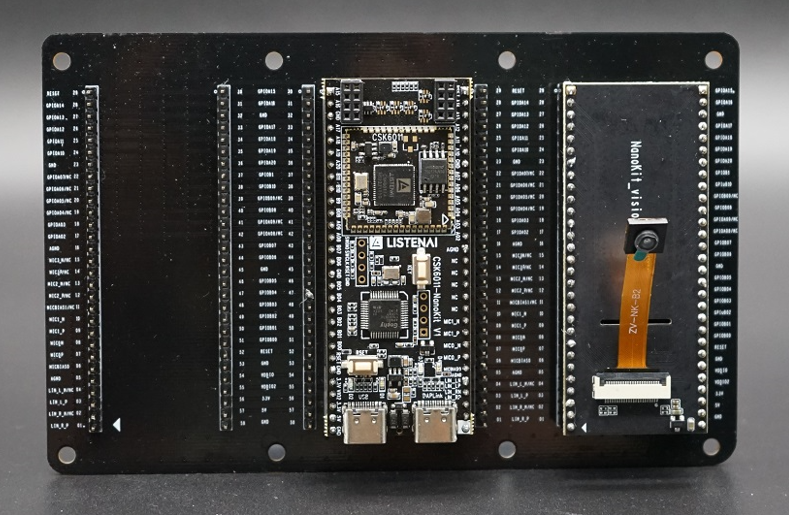
聆思科技发布的新一代AI芯片CSK6,集成了安谋科技星辰“STAR-MC1”处理器。
采用 NPU+DSP+MCU 三核异构技术,算力达到 128 GOPS。使芯片能以较低功耗满足音频及图像视频的 AI 应用需求。
同时他们也发布了一个基于开发板的解决方案,并提供了相关工具和例程。
为了方便大家调试、编译聆思科技CSK6开发板,我在这里构建了一个容器化编译环境。一条命令拉取即可开始编译工作。
docker run -it verdureorange/listenai:latest
里面自带的Lisa工具,以及相关例程均来自聆思科技官方网站。
VERSION:
@listenai/lisa/2.4.5 linux-x64 node-v16.14.0
如果你正在使用聆思科技的CSK6开发板,又懒的自己配环境,可以用它试试。
教学视频:
容器化构建聆思科技CSK6开发编译环境_哔哩哔哩_bilibili
镜像:
https://hub.docker.com/r/verdureorange/listenai
相关文章:
带NPU和DSP的聆思科技MCU来了
https://aijishu.com/a/1060000…
有问题和意见可以联络:Medivh
邮箱:verdureorange@gmail.com
在本地的 vmware 虚拟机管理系统中 安装 Ubuntu 20.x 时,发现全新系统安装的特别慢。一直卡在 installing kernel / 这个页面。
通过日志排查发现 在安装之前 系统源虽然自动切换到 http://cn.archive.ubuntu.com/ubuntu/ 这个官方系统源地址,但这个地址的数据服务器其实是在 美国数据中心,导致我们系统一直无法进行相关文件的下载。
解决方法:
将官方安装源:
http://cn.archive.ubuntu.com/ubuntu/
替换成 阿里云
http://mirrors.aliyun.com/ubuntu/
这样就可以很好的解决了 系统一直卡在安装界面中, 另外系统安装完成后,你更新 系统 以及 安装 各种组件时 都会默认使用 阿里云的镜像进行下载,而不会在通过 Ubuntu 官方的美国机器。
马特·埃德蒙森(Matt Edmondson)是一名数字取证专家,也是国土安全部的联邦特工。
在一位朋友担心被跟踪后,他制作了一个基于Raspberry Pi的反跟踪工具。

整个设备都装在鞋盒大小的防水箱内。基础由树莓派3构成。
外接无线网卡和无线信号探测器,可查找附近的设备。
充电宝为一切提供动力,触摸屏显示设备发送的每个警报。
以便用户可以直观地看到哪些设备不断弹出以及多久弹出一次。
该设备运行Kismet软件来检测附近正在寻找Wi-Fi或尝试连接到蓝牙设备的智能手机和平板电脑。Kismet 是一个网络检测器、数据包嗅探器和入侵检测系统,它可与任何支持原始监视模式的无线网卡一起运行。
我们都知道我们的手机会记录应用程序使用情况和位置。
但你可能不知道,你的手机也在不断寻找周围的无线网络。当它找到一个以前连接过的网络时,它会特别兴奋。
“特别兴奋”是指“做一些不同的事情,以一种特殊的方式通知Kismet”。
如果Kismet发现它在过去二十分钟内看过这个设备,它会发出一条警告,让用户知道他们可能被跟踪。

Matt用Python编写了一些代码,以便保留反跟踪工具接触过的设备列表,检查日志并查看上次遇到每个设备的时间。
这种自制的反跟踪设备专为人们在移动中设计。
如果你在一个地方坐了很长时间,而有些人总在你周围闲逛(比如电影院或餐馆),那你每二十分钟就会被提醒一次,让你知道周围可能有人跟踪你。
你可以在2022年8月的黑帽美国安全会议上看到Matt在此设备上的演示文稿,或者前往GitHub查看他针对此反跟踪构建的代码。
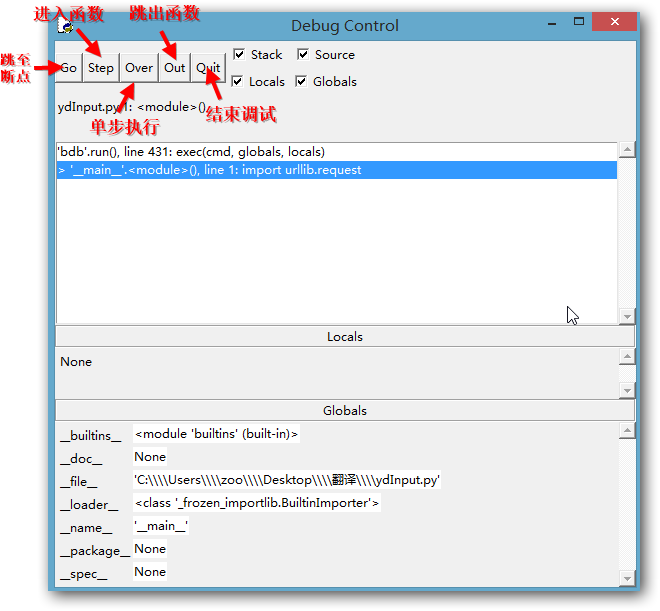
IDLE的调试方法:
1.设置断点:在Python编辑器中要调试的代码行右击->Set Breakpoint,之后该行底色就变黄了
2.打开debugger:Python Shell->Debug->Debugger
3.编辑窗口按F5
4.debug过程略
Go表示运行完相当于eclipse的F8,不过按F5后先要go一下才能往下走,默认是不运行的
Step表示一步一步相当于eclipse的F5
Over表示跳过函数方法相当于eclipse的F6
Out表示跳出本函数相当于eclipse的F7
IDLE编辑器快捷键
自动补全代码 Alt+/(查找编辑器内已经写过的代码来补全)
补全提示 Ctrl+Shift+space(默认与输入法冲突,修改之)
(方法:Options->configure IDLE…->Keys-> force-open-completions
提示的时候只要按空格就出来对于的,否则翻上下键不需要按其他键自动就补全了)
后退 Ctrl+Z
重做 Ctrl+Shift+Z
加缩进 Ctrl+]
减缩进 Ctrl+[
加注释 Alt+3
去注释 Alt+4
Python Shell快捷键
自动补全同上
上一条命令 Alt+P
下一条命令 Alt+N
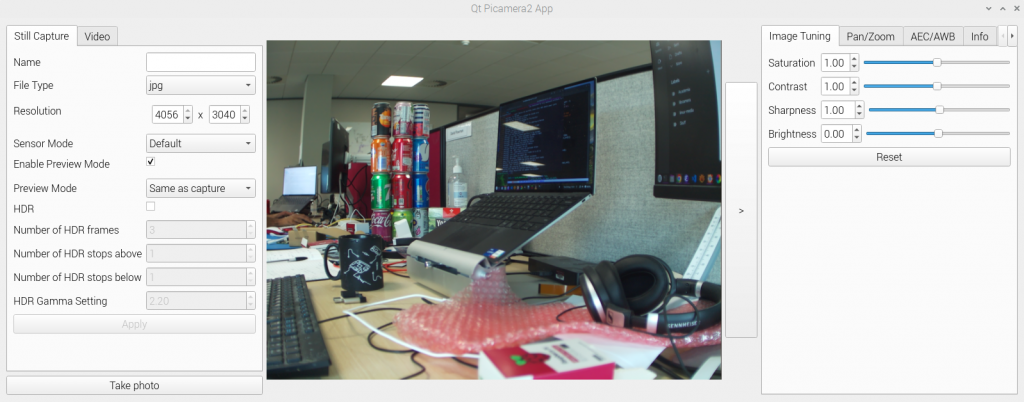
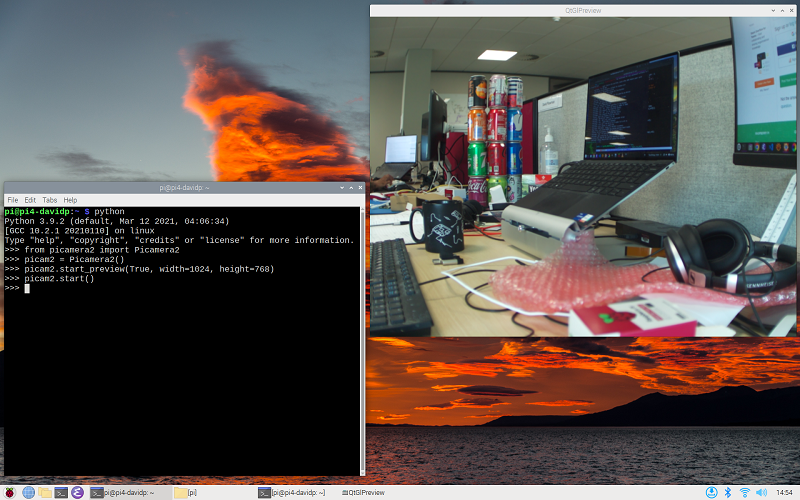
最近发布的 Raspberry Pi OS 映像,终于预装了Picamera2库的 beta 版本。它是旧 PiCamera 库的替代,也是未来树莓派摄像头的官方首选开发库。
从早期版本开始,PiCamera 就非常受用户欢迎,因为它提供了一种非常简单而开放的Raspberry Pi 摄像头调用方式,让大家远离了专有和闭源的摄像头API(比如Broadcom的)。
Picamera2 主要特点
1、支持命令行驱动,你可以将 Picamera2 的命令直接通过Python 解释器或 Python 脚本调用。
2、使用OpenGL加速硬件辅助渲染,或在X windows未运行时使用DRM/KMS进行高速渲染。
3、支持将现成的 Picamera2 组件嵌入到 Qt 应用程序中。
4、原生支持 numpy,使其与 OpenCV、TensorFlow 和其他 Python 库一起使用非常自然。
5、所有源代码都可以在Picamera2 GitHub 页面上获得,或者作为libcamera 项目的一部分。
6、支持所有官方树莓派相机,也支持一些第三方相机
还有一些功能,例如视频编码和录制(可自定义输出对象),同时录制音频和视频的能力。在摄像头图像上显示叠加层等等。
要了解更多信息,请查阅大量示例脚本和应用程序,或查阅我们的Picamera2 用户手册。
Picamera2 仅在最近的 Bullseye (新的树莓派系统代号)上受支持。
Buster 或更早的版本不支持它,Raspberry Pi OS Legacy 也不支持。所有这些用户都只能继续使用旧的 PiCamera 库。
在最新的 Bullseye 系统上已经安装了 Picamera2。
需要命令行安装的话可以输入:
sudo apt install -y python3-picamera2
Raspberry Pi OS 用户会发现新的系统中, Picamera2 已经完整安装,包括 Qt 和 OpenGL。
Raspberry Pi OS Lite 默认随 Picamera2 一起安装,但没有 Qt 和 OpenGL。原因是用 Raspberry Pi OS Lite 的低配Pi 运行基于 X Windows 的应用程序或通过 X Windows 显示堆栈进行渲染会比较卡。
如果需要在Raspberry Pi OS Lite上使用 Qt 和 OpenGL,可以这么安装。
sudo apt install -y python3-pyqt5 python3-opengl
如果你用的是未安装 Picamera2 的较早版本的 Bullseye,又不用 Qt 和 OpenGL 的话,安装它的命令:
sudo apt install -y python3-picamera2 –-no-install-recommends
之前通过 pip 安装过 Picamera2 的用户
一些用户可能以前使用pip,那需要先卸载再安装。当然,你可以继续用pip的方式。
如何尝试 Picamera2?
有一些示例脚本很有帮助,你可以下载并运行它们:
git clone https://github.com/raspberrypi/picamera2.git
python picamera2/examples/preview.py
如果遇到任何困难,请注意以下几点:
export LIBCAMERA_LOG_LEVELS=*:3(或将其放入.bashrc)。如果有任何其他问题或疑问,可加入树莓派摄像头论坛讨论。
视频地址:
https://mp.weixin.qq.com/s/wYKvfumwgpyK7EUVU2AE0w
https://weibo.com/5408421566/M1milvVlX
相关代码:
1、Dropbox
链接:https://www.dropbox.com/sh/u8a45maz3brrwrw/AADbUx9VZEw5UJPny1bJI-Lwa
2、百度网盘
链接:https://pan.baidu.com/s/1kc8RyThILrkOc4ObzOXD0Q?pwd=vrag
提取码:vrag
在本指南中,记录下如何在树莓派上玩第一人称射击类游戏,需要安装和配置Quake 3。
《Quake 3》是第一人称射击游戏,可以进行多人竞技场射击竞赛。
虽然《Quake 3》早在1999年就已经发布,但在射击游戏爱好者中仍然备受推崇。
软件开发团队发布了引擎的源代码,现在它已经被移植到各种设备上运行,包括树莓派。
在本教程中,我将通过两种不同的方法让Quake 3在树莓派上运行。
第一个也是最直接的方法是使用通过包仓库提供的编译版本安装,这种方法虽然简单,但性能略差。
另一种方法是编译高度优化的Q3Lite,Q3Lite可以在树莓派上高帧数运行,这是比较好的选择。
既然要玩游戏,必然需要运行一个带有桌面界面的Raspberry Pi操作系统版本。
下面是所有的设备清单,点击链接直达特别优惠购买
我在Raspberry Pi 4和Raspberry Pi 3B+上测试了本教程,运行的是Raspberry Pi OS的最新可用版本(Buster版本)。
从Raspberry Pi OS软件包仓库安装Quake 3是最简单的方式。
与更快的Q3Lite相比,有几个优点。
首要原因是它的安装和运行超级简单。只需几个命令,就可以将Quake 3安装到Raspberry Pi上。
第二个原因是,如果使用的是树莓Pi 4,这是目前玩Quake 3 Arena的唯一方式。Q3lite目前还不支持Pi 4的硬件。
缺点是,性能还有很多需要改进的地方。一旦增加了多个玩家,帧数就会急剧下降。
在本节中,完成Quake 3安装到Raspberry Pi上。
为了使这个过程简单化,我使用了Raspberry Pi OS资源库提供的Quake 3版本。
1. 第一个任务是更新操作系统。
可以通过运行以下两个命令来升级所有已经存在的软件包。
sudo apt update
sudo apt full-upgrade2. 现在操作系统已经更新了,开始从资源库中下载Quake 3。
运行以下命令开始安装。
sudo apt install quake3这个命令直接从Raspbian仓库下载软件包。请注意,这不包含游戏数据,只包含Quake 3 Arena引擎的移植版本。
3. 安装好Quake 3软件包后,需要通过下面的命令来下载游戏数据。
使用了一个名为game-data-packager的程序。这个程序会将Quake 3竞技场的演示数据下载到设备上。
game-data-packager quake3 -i --gain-root-command sudo这个过程需要一些时间,因为它会下载Quake 3的数据并将其提取到所需位置。
4. 如果想使用Quake 3的零售版,那么你还需要遵循几个步骤。
首先,从Quake 3 Arena零售版安装中找到名为pak0.pk3的文件。
然后将该文件复制到Raspberry Pi上的以下目录/usr/local/games/quake3/baseq3。
完成Quake 3的安装到Pi上,就可以运行它了。
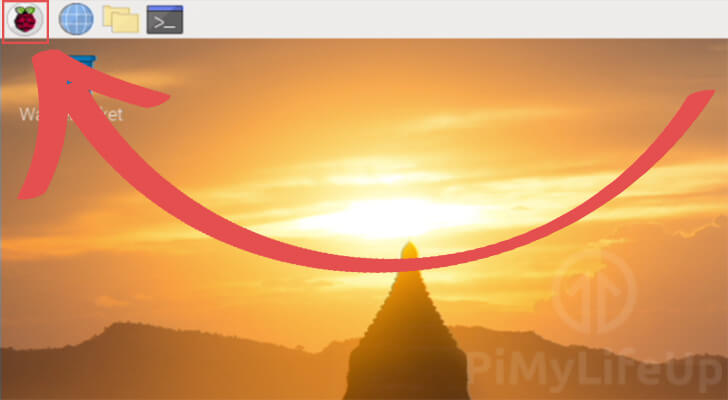
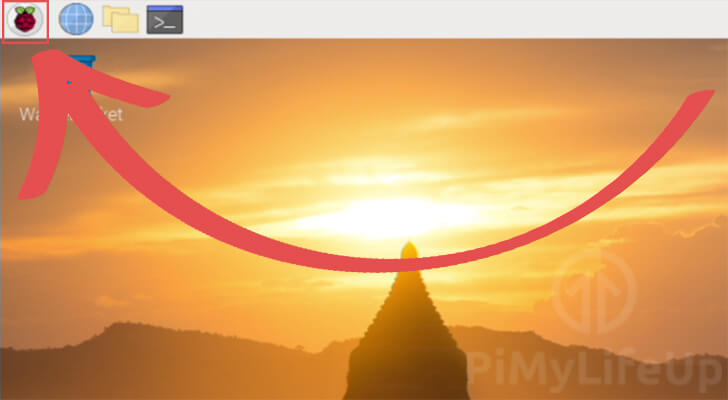
1. 要在Raspberry Pi上找到Quake 3,打开开始菜单。
点击屏幕左上角的树莓图标即可打开。
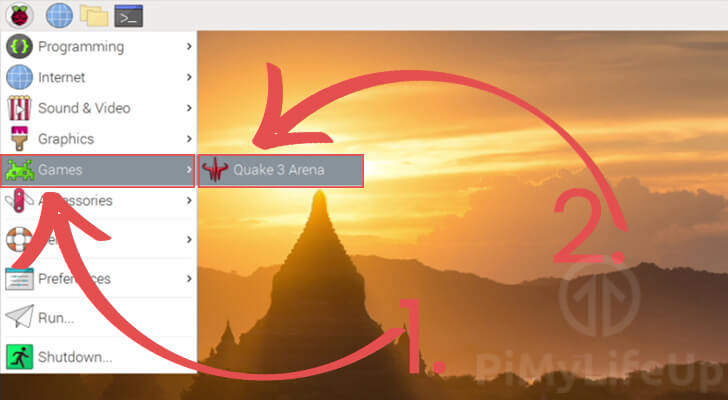
2. 接下来需要将鼠标悬停在 “游戏 “菜单上(1. 将鼠标悬停在这个选项上,会弹出操作系统上安装的游戏列表。
在出现的菜单中,点击 “Quake 3 Arena “选项(2.
3. 现在已经在树莓派上运行Quake 3了,并且进入到它的主菜单。
在这个菜单中,可以开始一个新的游戏,并配置游戏的分辨率等设置。
在本节中,完成在树莓派上编译Q3Lite。
使用Q3Lite版《Quake 3》最显著的优势是性能。
Q3Lite采用了ioquake3引擎,删去了不需要的功能,并实现了OpenGL ES渲染器。这两项改进结合在一起,使得所有的树莓PIS都能有更快的渲染速度。
使用此构建,可以在非超频的Raspberry Pi 3上轻松实现每秒超过60帧的速度。
现阶段,Q3Lite目前还没有对树莓派4的支持。不过,很快就应该会支持了。
在本节中,完成将Quake 3编译安装到Raspberry Pi。
为了简化这个过程,使用Raspberry Pi操作系统仓库提供的Quake 3版本。
1. 在Pi上编译Q3Lite之前,需要确保操作系统是最新的。
可以运行以下命令更新所有现有的软件包。
sudo apt update
sudo apt full-upgrade2. 接下来,需要安装编译Q3Lite所需的所有包。
运行下面的命令来安装所需的软件包。
sudo apt install git libasound2-dev libudev-dev libibus-1.0-dev libevdev-dev libdbus-1-dev libcurl4-openssl-dev fcitx-libs-dev libgbm-dev libsamplerate0-dev xinput3. 包全部安装完毕后,来下载Q3Lite源码。
可以利用git程序来检索所需的代码。
git clone https://github.com/cdev-tux/q3lite.git3. 现在cd到Q3Lite目录下。
cd ~/q3lite4. 现在运行Q3Lite团队编写的bash脚本。
这个脚本将完成所有繁重的工作,编译Q3Lite软件以及下载它所需要的所有额外数据。
sudo ./make-raspberrypi.sh这个编译过程会花费一些时间,这个过程在较新的Raspberry Pi上会更快些。
5. 下一步就是安装Quake 3 Arena的补丁数据。
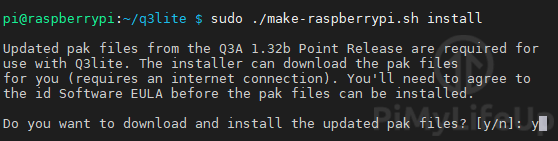
使用make-raspberrypi脚本。
sudo ./make-raspberrypi.sh install6. 在安装过程中,会被问到是否要下载更新的Quake 3 pak文件。
由于Q3Lite需要这些文件,输入y,然后按回车键。
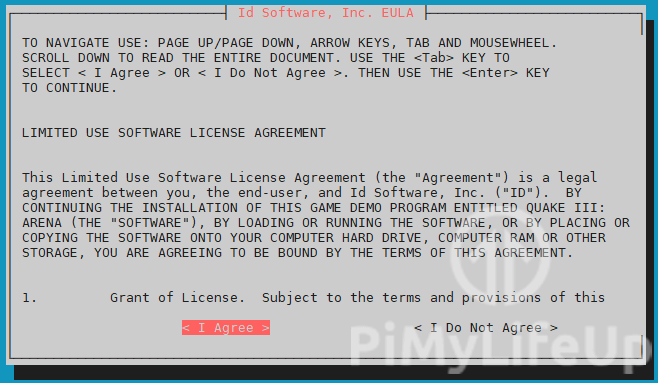
7. 在脚本下载pak文件之前,需要同意idTech的EULA。
使用TAB键选择”<I Agree>”,然后按ENTER键。
8. 安装过程完成后,可以获取游戏数据来玩了。
对于这一步,需要在其他设备上拥有Quake 3 Arena,或者下载并安装Quake 3 Demo。
1. 需要在Quake 3的安装目录下找到一个名为pak0.pk3的文件。
这个文件包含了Quake 3所需要的所有数据,包括关卡、角色和声音。
2. 找到了这个文件的位置,把它复制到Raspberry Pi上。
需要复制到的文件夹位于Raspberry Pi上的/usr/local/games/quake3/baseq3。
3. 把文件复制过来,就可以在目录上使用ls命令来验证一切是否正常。
ls -l /usr/local/games/quake3/baseq3/从这个命令中,应该看到类似下面的东西。现在系统上已经有了所有需要的游戏包。
-rw-r--r-- 1 root root 479493658 Jun 11 09:30 pak0.pk3
-rw-r--r-- 1 root root 374405 Nov 14 2002 pak1.pk3
-rw-r--r-- 1 root root 7511182 Nov 14 2002 pak2.pk3
-rw-r--r-- 1 root root 276305 Nov 14 2002 pak3.pk3
-rw-r--r-- 1 root root 9600350 Nov 14 2002 pak4.pk3
-rw-r--r-- 1 root root 191872 Nov 14 2002 pak5.pk3
-rw-r--r-- 1 root root 7346884 Nov 14 2002 pak6.pk3
-rw-r--r-- 1 root root 320873 Nov 14 2002 pak7.pk3
-rw-r--r-- 1 root root 454478 Nov 14 2002 pak8.pk3
drwxr-xr-x 2 root root 4096 Jun 11 08:43 vm现在已经完成了Q3Lite的安装,终于可以在Raspberry Pi上启动它了。
1. 首先,打开Raspberry Pi上的开始菜单。
可以通过点击屏幕左上角的树莓图标打开开始菜单。
2. 在开始菜单中,需要将鼠标悬停在 “游戏 “选项上(1.
然后将鼠标悬停在 “Q3lite “文件夹上(2。
在弹出的菜单内,点击 “Q3lite “选项(3.

3. 现在有一个完全可以运行的Quake 3在Raspberry Pi上。使用优化后的Q3Lite引擎。

到这里,你应该已经在你的Raspberry Pi上安装并运行了Quake 3。
原文:
https://pimylifeup.com/raspberry-pi-quake-3/
翻译:
如何在树莓派上玩射击游戏,Raspberry Pi 安装Quake 3
Apache IoTDB(物联网数据库)是一体化收集、存储、管理与分析物联网时序数据的软件系统。
采用轻量式架构,具有高性能和丰富的功能,并与Apache Hadoop、Spark和Flink等进行了深度集成,可以满足工业物联网领域的海量数据存储、高速数据读取和复杂数据分析需求。
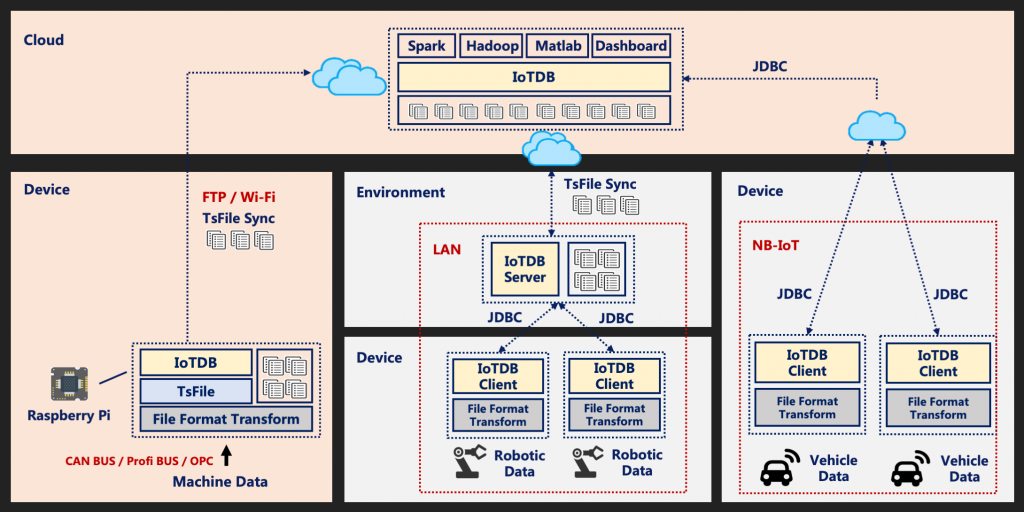
官方提供了x86的版本和源代码,但没提供ARM的版本。
这里编译了一个arm64的版本,方便广大的ARM玩家测试使用。
你可以在树莓派4B,Rockpi,Firefly,香蕉派等arm64架构的系统上调试,运行此镜像。
注:这里的v0.13版本,对应的是apache-iotdb-0.13.0-server-bin.zip这个官方包。
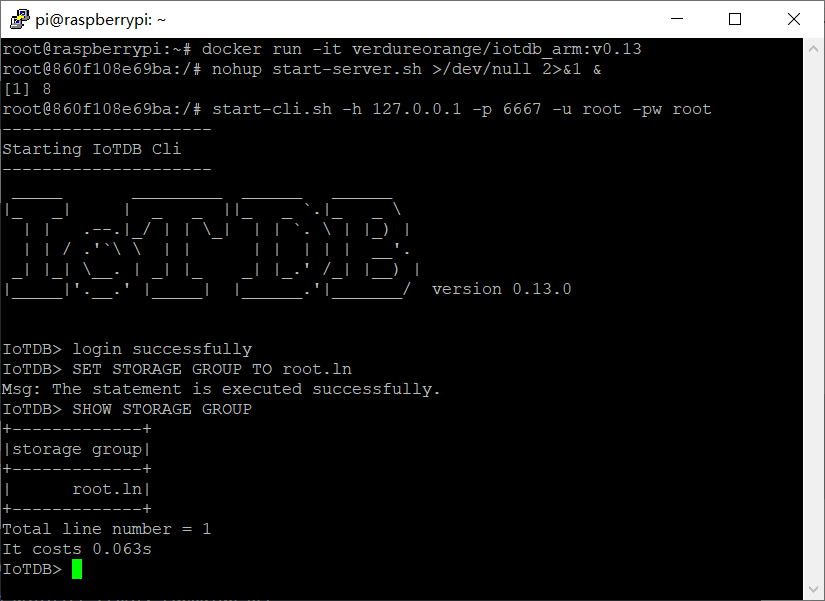
主要工作目录:
/iotdb/sbin
运行后,执行start-server.sh文件,即可启动IoTDB。
nohup start-server.sh >/dev/null 2>&1 &
默认用户名密码都是root。
命令行登录,请执行:
start-cli.sh -h 127.0.0.1 -p 6667 -u root -pw root
官方仓库说明:
https://hub.docker.com/r/verdureorange/iotdb_arm
直接拉取镜像:
docker pull verdureorange/iotdb_arm:v0.13
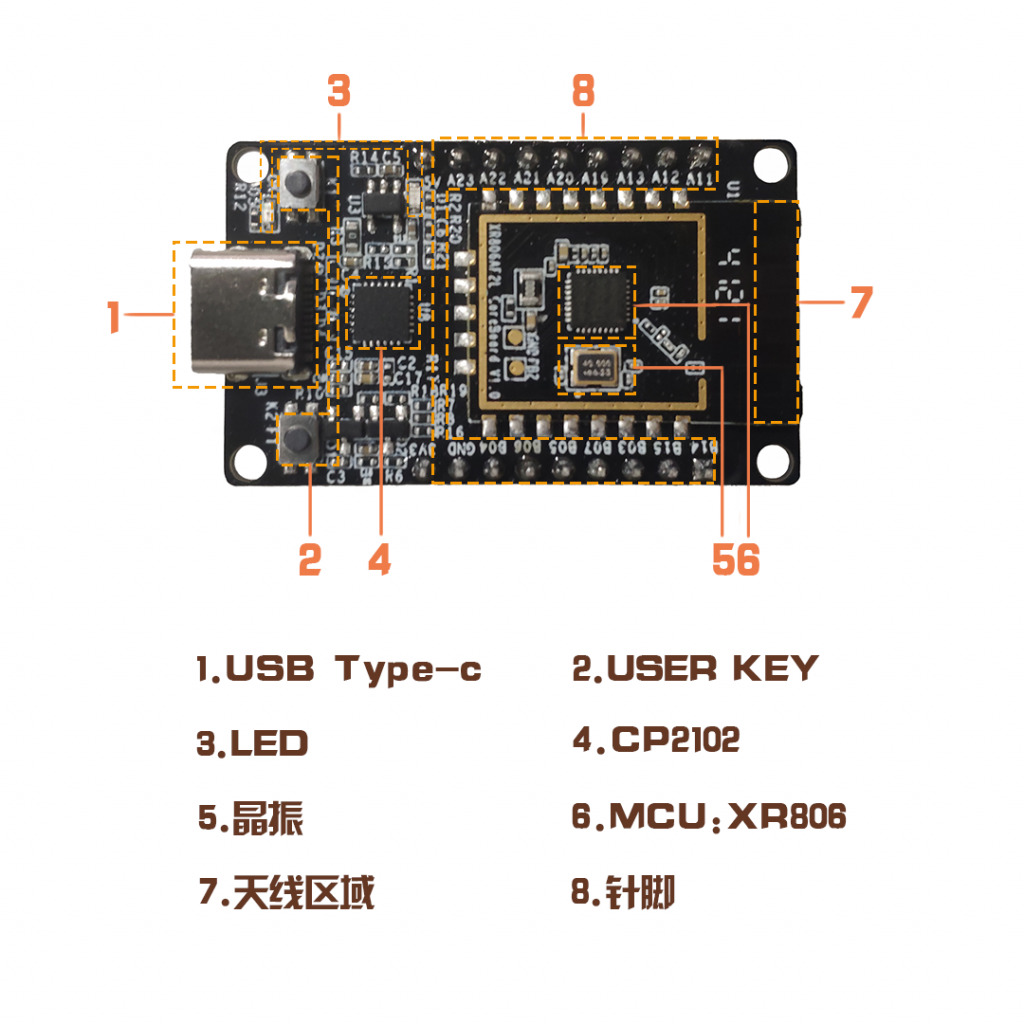
之前,全志科技XR806主要是用来跑OpenHarmony(鸿蒙)的。
但由于鸿蒙这个操作系统还比较新,编译环境配置起来有些麻烦,于是我就做了一个基于Docker的交叉编译环境。
最近看到全志科技公布了XR806的FreeRTOS SDK,赶紧一探究竟。
其实全志之前出了几个版本,现在这个1.2.1版本经过多方测试,比较稳定。
先来看看这个版本的主要功能。
xr806_sdk-v1.2.1的主要功能描述如下: 1、支持WiFi STA/AP模式; 2、支持WiFi WPA3功能; 3、支持BLE扫描、广播、连接、配对; 4、支持BLE MESH; 5、支持SoundConfig、AirKiss、SmartConfig、APConfig配网; 6、支持MbedTLS、MQTT、WebSocket等多种网络协议; 7、支持PSRAM、DMA、GPIO、UART、PWM、CODEC播放与录音、ADC转换、硬件加解密、看门狗等多种外设; 8、支持MP3、M4A、AAC、AMR、TS、M3U8等音频的播放,支持Flash、HTTP、HTTPS、音频数据流播放。
FreeRTOS是国际上比较流行的一款MCU的嵌入式操作系统。
历史悠久,用户基础很大。
为了方便初学者调试,我这里顺便做了一个FreeRTOS交叉编译的Docker版本。
Docker官方仓库地址:
https://hub.docker.com/r/verdureorange/ubuntu_xr806
安装方式:
在已经安装Docker的情况下,执行以下命令:
docker run -it verdureorange/ubuntu_xr806:v2 /bin/bash
注:v1是OpenHarmony的环境,v2才是FreeRTOS的,请勿搞混。